Equations différentielles partielles dans les blocs de résolution
pdesolve(u, x, xrange, t, trange, [xpts], [tpts]) : renvoie une fonction ou un vecteur de fonctions u(x,t) qui résout une équation différentielle partielle (PDE) non linéaire à une dimension ou un système d'équations différentielles partielles, avec des contraintes d'égalité indépendantes n pour une équation différentielle d'ordre n. Les valeurs sont interpolées à partir d'une matrice de points de solution calculée à l'aide de la méthode numérique des lignes.
Vous devez utiliser pdesolve dans un bloc de résolution.
Arguments
• u est un nom de fonction scalaire ou un vecteur du nom de fonction (sans noms de variable inclus) tel qu'il apparaît dans le bloc de résolution. Par exemple, si vous résolvez les fonctions f(x,t) et g(x,t), u serait :

Pour prendre en charge la notation différentielle partielle en indice, vous ne pouvez pas utiliser d'indices littéraux lors de la dénomination des fonctions.
• x est le nom de la variable spatiale.
• xrange est un vecteur colonne à deux éléments contenant les valeurs limites réelles de x.
• t est le nom de la variable temporelle.
• trange est un vecteur colonne à deux éléments contenant les valeurs limites réelles de t.
• xpts (facultatif) est le nombre entier de points de discrétisation spatiale.
• tpts (facultatif) est le nombre entier de points de discrétisation temporelle.
Les règles générales de définition d'un bloc de résolution s'appliquent. Dans le corps du bloc :
Fonctions inconnues
Les fonctions doivent être définies selon leurs variables. Par exemple, utilisez u(x,t) et non u. Pour indiquer une dérivée partielle dans le bloc de résolution, utilisez l'une des options suivantes :
• Notation en indice. Par exemple, uxx(x,t) est la deuxième dérivée partielle de u par rapport à x.
La notation en indice ne peut être utilisée que dans pdesolve des blocs de résolution, et non dans d'autres zones du document. |
Equations PDE
Les équations doivent être définies à l'aide d'égalités booléennes. Les dérivées partielles secondes ne sont pas autorisées à gauche des équations, vous devez convertir votre équation en un système d'équations de dérivées premières uniquement.
Conditions aux limites
Pour chaque fonction inconnue, il doit y avoir une condition initiale u(x,0) et des conditions aux limites n, où n est l'ordre de la PDE. Mathcad vérifie que le type et le nombre de contraintes sont corrects et signale les erreurs par un message d'erreur.
• Les conditions aux limites peuvent être de type Dirichlet (u(0,t) = f(t)), Neumann (ux(0,t)=g(t)) ou un hybride des deux.
• Les conditions aux limites peuvent être spécifiées à l'un ou l'autre des points de terminaison de la plage d'intégration spatiale. Les points de terminaison utilisés dans les conditions aux limites doivent correspondre à ceux spécifiés dans la commande ode/pdesolve.
• Bien que Mathcad puisse résoudre une fonction pdesolve avec une condition aux limites implicite, dans certains cas, la fonction pdesolve ne peut pas être résolue en raison des limitations des algorithmes d'approximation. Il est donc recommandé d'utiliser des conditions aux limites explicites dans la mesure du possible.
Contraintes
Les contraintes algébriques de la forme u(x,t)+v(x,t)+w(x,t)=0 sont autorisées. Cela ajoute une fonction w inconnue supplémentaire au système, qui doit être spécifiée comme l'une des fonctions de sortie dans l'appel ode/pdesolve. Les contraintes d'inégalité ne sont pas autorisées.
• Affectez la sortie de la fonction pdesolve à un nom de fonction ou à un vecteur de noms de fonction.
• Pour modifier la méthode d'approximation utilisée pour les dérivées partielles, cliquez avec le bouton droit sur la fonction pdesolve et choisissez une autre méthode. Le temps de calcul peut en être affecté.
• La méthode numérique des lignes n'est appropriée que pour la résolution d'équations différentielles partielles hyperboliques et paraboliques, et d'équations algébriques partielles. Pour résoudre une équation dans une boucle de programme, utilisez numol. Pour résoudre une équation différentielle partielle et elliptique, comme une équation de Poisson, utilisez Relax ou Multigrid.
Erreurs et solutions avec pdesolve
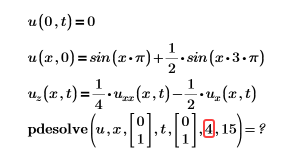
• Erreur : Cette fonction requiert au moins 5 arguments, mais s'applique à 4.
Exemple :
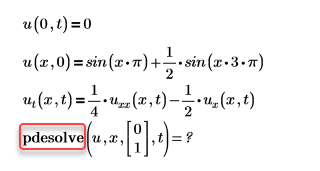
Solution : ajoutez un argument manquant, trange dans le cas présent.
• Erreur : Cette fonction accepte au plus 7 arguments, mais s'applique à 8.
Exemple :
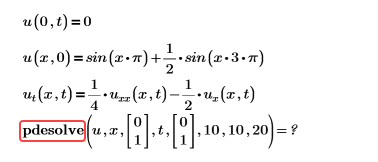
Solution : supprimez les arguments inutiles. Afficher plus d'informations sur les arguments
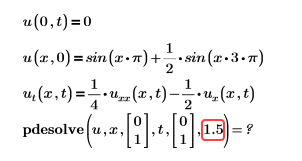
• Erreur : Vecteur des limites mal formé pour la variable de temps.
Exemple :
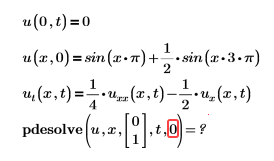
Solution : la définition de trange est incorrecte. Afficher plus d'informations dans arguments
• Erreur : Vecteur des limites mal formé pour la variable d'espace.
Exemple :
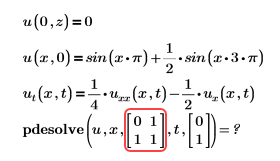
Solution : la définition de xrange est incorrecte. Afficher plus d'informations dans arguments
• Erreur : Nom de fonction inconnue incorrectement spécifié
Exemple :
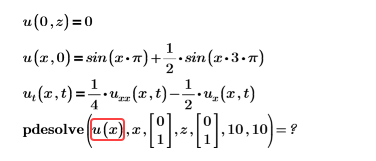
Solution : la fonction doit apparaître sans argument.
• Erreur : doit être un entier supérieur à 4.
Exemple :
ou
Solution : le nombre de points de discrétisation doit être un entier supérieur à 4.