動態齒輪對的類型
齒輪對的每種類型皆由其運動軸定義,如下表所示。
每種類型的齒輪對均由其運動軸定義。
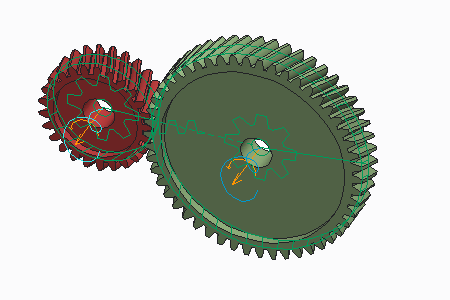
• 「正」(Spur) - 兩個彼此交互滾動的圓柱體 (螺旋循環直徑是匹配的)。齒輪之間的反應力根據轉換的扭矩、齒輪直徑及製造角度計算。正齒輪可有螺旋角度,也稱為螺旋正齒輪。
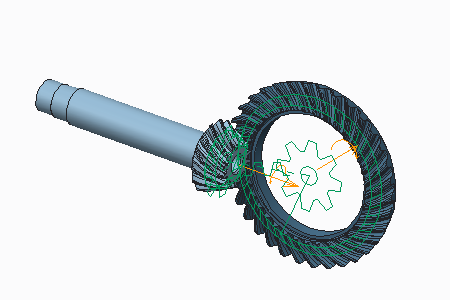
• 「斜角」(Bevel) - 兩個彼此交互滾動的圓錐 (螺旋循環直徑是匹配的)。齒輪之間的反應力根據轉換的扭矩、齒輪直徑及製造角度計算。斜齒輪可有螺旋角度,也稱為螺旋斜齒輪。如果軸是平行的,斜齒輪相當於正齒輪。
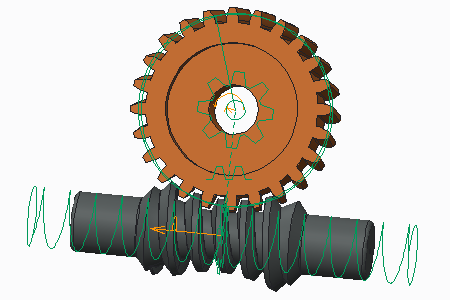
• 「蝸」(Worm) - 不同大小的兩個齒輪,其中蝸主體較小,但軸長於輪盤主體。蝸齒輪將被定義為彼此相互滑動且螺旋圈直徑是匹配的圓柱體。當需要大減縮比例時使用。
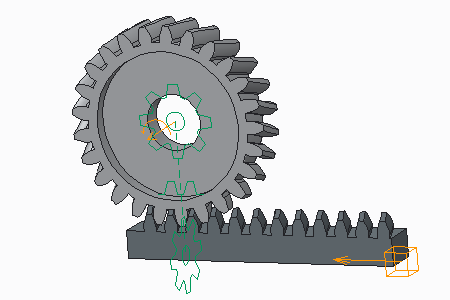
• 齒輪及小齒輪 - 將旋轉運動轉換為平移運動或反之。齒條和副齒輪對將被定義成在齒條螺旋曲面上滾動的圓柱體。根據轉換的扭矩、齒輪的分隔和製造角度計算齒輪之間的反作用力。