Динамическое позиционирование с опциями и исполнениями
Динамическая визуализация в сочетании с расширенными конфигурируемыми изделиями и узлами предоставляет стратегический набор возможностей, которые можно использовать для создания управляемых конфигурацией результатов. Возможность динамического позиционирования позволяет Windchill захватывать логику позиционирования сборки и использовать ее для визуализации и построения CAD-исполнений для сконфигурированного изделия. Это избавляет от необходимости поддерживать эту избыточную информацию в CAD-модели и структуре изделия для создания тех же результатов, управляемых конфигурацией.
Архитектура позиционирования помогает записать логику конфигурации, используемую для сборки конфигурируемого изделия. Архитектура позиционирования устанавливает пространственные взаимосвязи между конфигурируемыми узлами в конфигурируемом изделии. Интерфейс соединяет родительские и дочерние конфигурируемые узлы и определяет логику для относительного позиционирования при использовании локаторов. Локатор представляет концептуальное расположение, определенное для конфигурируемого узла. Эти концептуальные локаторы, используемые в архитектуре позиционирования, сопоставляются с системой координат, предоставленной в CAD-конструкции. Конечное положение конфигурируемых узлов в конфигурируемом изделии вычисляется путем выравнивания локаторов родительских и дочерних конфигурируемых узлов интерфейса.
Для использования этой возможности доступны следующие пользовательские интерфейсы Windchill:
• Редактор архитектуры - позволяет определить архитектуру позиционирования для конфигурируемого изделия. Ее можно запустить, выбрав действие Открыть в редакторе архитектуры в меню Действия, доступном для конфигурируемого изделия. Дополнительные сведения см. в разделе Управление архитектурой позиционирования в редакторе архитектуры.
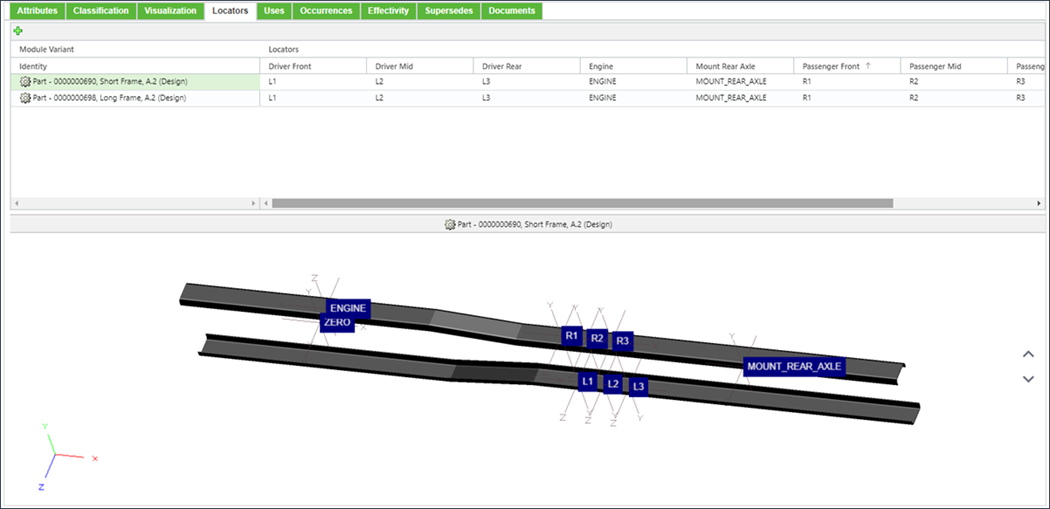
• Вкладка Локаторы - позволяет определить локаторы для конфигурируемой детали и сопоставить с локаторами системы координат, определенными в представлениях исполнения узла. Эта вкладка доступна в браузере структуры детали. Дополнительные сведения см. в разделе Управление определениями локаторов на вкладке "Локаторы".
|
|
Действие Открыть в редакторе архитектуры и вкладка Локаторы доступны только в том случае, если включена настройка Поддержка конфигурируемого узла.
|
После определения архитектуры позиционирования при просмотре сконфигурированного изделия на вкладке Визуализация приложение автоматически позиционирует конфигурируемые узлы в соответствии с определенной архитектурой позиционирования. Затем можно открыть полученное позиционированное изделие в сессии CAD для продолжения анализа конструкции и последующей работы.
Рабочий процесс динамического позиционирования
Следующая схема иллюстрирует типичный рабочий процесс динамического позиционирования:

Терминология
В динамическом позиционировании используются следующие ключевые термины.
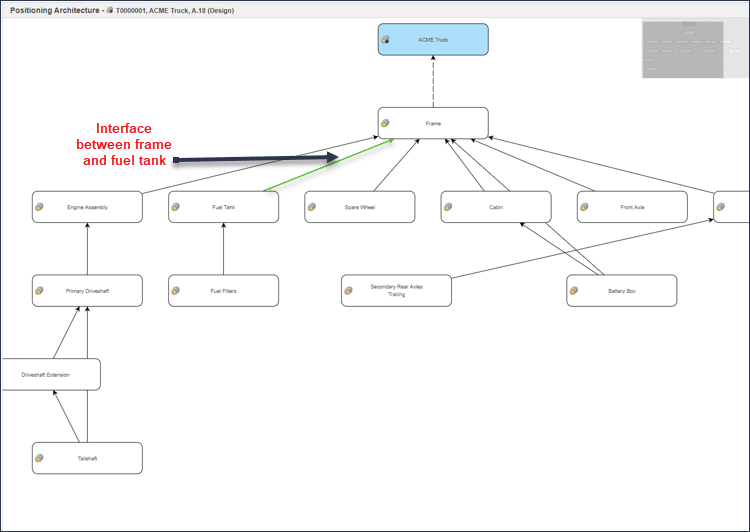
• Архитектура позиционирования - архитектура позиционирования представляет диаграмму, определяемую конфигурируемыми узлами и соединителями, которые фиксируют логику конфигурации и описывают, как собираются компоненты конфигурируемого изделия.
• Интерфейс - интерфейс определяет взаимосвязь, которая может использоваться для сборки потомка для родительских конфигурируемых узлов, определенных в архитектуре позиционирования. Назначенные выражения используются для выбора локаторов, которые должны использоваться при построении сконфигурированного изделия.
• Локатор - локатор представляет концептуальное расположение, определенное для конфигурируемого узла, который используется для сборки дочерних и родительских конфигурируемых узлов. Локаторы сопоставляются с системами координат для каждого исполнения узла в конфигурируемом узле. Эти системы координат представляются на основе CAD-конструкции. Дополнительные сведения см. в разделе Converting the Locator for the Platform Structure Visualization (Преобразование локатора для визуализации структуры платформы) (на английском языке) в справочном центре Creo View. Устанавливая такое сопоставление между локатором конфигурируемого узла и системой координат в каждом исполнении узла, Windchill может использовать архитектуру позиционирования, чтобы вычислить положение для взаимозамены каждого исполнения модуля.
Дополнительные сведения о ключевых терминах, связанных с опциями и исполнениями, см. в разделе Терминология, используемая в опциях и исполнениях.
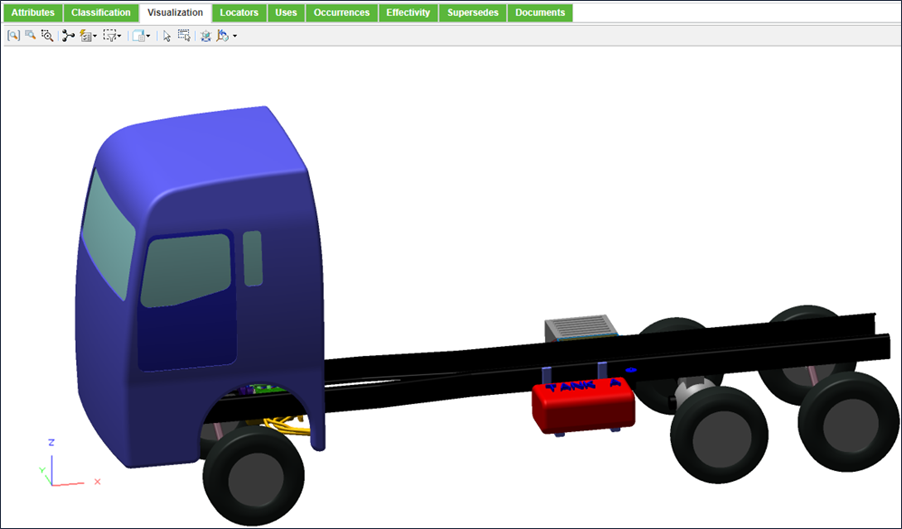
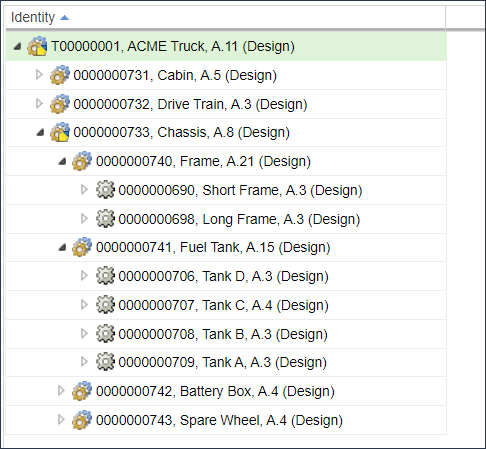
Рассмотрим пример конфигурируемого изделия Truck, которое содержит раму, сконфигурированную для нескольких размеров, и топливный бак, сконфигурированный с несколькими решениями, который может быть собран в разных положениях на раме.
Точка сборки рамы с топливным баком представляется интерфейсом.
Интерфейс будет использовать локаторы, чтобы описать, где может быть собран топливный бак. В примере, приведенном ниже, топливный бак может быть смонтирован слева или справа и размещен в положении Driver Front, Driver Mid или Driver Rear на раме. Выбор позиций для использования выполняется путем назначения выражений, относящихся к локаторам.
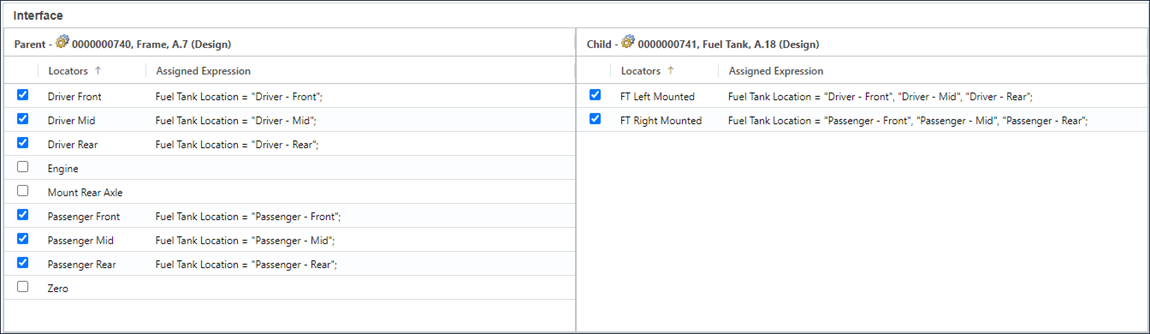
Локаторы будут сопоставлены с системами координат, присутствующими в конструкциях для каждого варианта рамы и топливного бака.
При просмотре сконфигурированного изделия на вкладке Визуализация теперь можно видеть расположение топливного бака, рассчитанное на основе архитектуры позиционирования: