벽 5축 마무리 시퀀스 생성하기
벽 5축 마무리 시퀀스를 정의하여 포켓 형태의 형상에서 벽 서피스를 가공합니다.
활성 작업이 밀링 기능이 있는 5축 밀링 또는 밀링/선반가공 작업 센터를 참조하는지 확인합니다.
|
|
밀링/선반가공 작업 센터에서의  벽 5축 마무리(Wall 5 Axis Finish) 명령은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. 벽 5축 마무리(Wall 5 Axis Finish) 명령은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. |
1. 고속 밀링(High Speed Milling) 그룹에서 > 벽 5축 마무리(Wall 5 Axis Finish)를 클릭합니다. 벽 마무리(Wall Finish) 탭이 열립니다.
벽 5축 마무리(Wall 5 Axis Finish)를 클릭합니다. 벽 마무리(Wall Finish) 탭이 열립니다.2. 공구 관리자(Tool Manager)를 클릭하거나 공구 목록 상자에서 공구 편집(Edit Tools)을 선택하여 공구 설정(Tools Setup) 대화 상자를 열고 새 절삭 공구를 추가하거나 공구 매개 변수를 변경합니다. 공구 목록에는 단계에 적합한 공구만 포함되어 있습니다.
가공 공구의 현재 단계 및 활성 헤드에 대한 공구를 표시하려면 INCLUDE_ALL_TOOLS_IN_LIST 옵션을 YES로 설정합니다. |
이 시퀀스에 대해 지원되는 도구는 다음과 같습니다.
◦ Ball Mill(기본값)
◦ Taper Ball Mill
◦ Barrel Tangent
◦ Barrel Taper
벽 5축 마무리의 경우 자동 기울기가 제대로 작동하려면 홀더를 사용하거나 충분히 긴 공구를 사용하는 것이 좋습니다. |
3. 절삭 공구와 해당 방향을 그래픽 창에서 미리 보려면 공구(Tool) 목록 옆에 있는  공구 미리 보기(Tool Preview)를 클릭합니다.
공구 미리 보기(Tool Preview)를 클릭합니다.
공구 미리 보기(Tool Preview)를 클릭합니다.| 공구 미리 보기(Tool Preview) 버튼은 공구를 선택한 후에 사용할 수 있습니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 공구 미리 보기(Tool Preview) 옵션을 선택합니다. 공구를 선택한 후 그래픽 창의 바로 가기 메뉴에서 공구 미리 보기(Tool Preview) 옵션을 사용할 수 있습니다.
공구 미리 보기를 종료하려면 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 공구 미리 보기 취소(Cancel tool preview)를 선택하거나 공구 미리 보기(Tool Preview)를 다시 클릭합니다.
공구 미리 보기(Tool Preview)를 다시 클릭합니다.4. 단계의 방향을 정의하는 좌표계를 변경하려면  에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.
에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.
에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.◦ 기본값(Default) - 선택한 좌표계를 기본 참조로 대체합니다. 기본값은 이전 단계나 작업에서 복사된 방향입니다.
◦ 정보(Information) - 선택한 좌표계에 대한 정보를 표시합니다.
작업 센터 설정에 두 개의 스핀들이 있는 경우 목록에서 기본 스핀들(Main Spindle) 또는 하위 스핀들(Sub Spindle)을 선택하고 각 기본 스핀들 및 하위 스핀들에 대한 좌표계를 선택합니다.
하위 스핀들은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. NC 시퀀스에 대해 지정한 좌표계는 변경할 때까지 유효합니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 방향(Orientation)을 선택합니다.
5. 다음 탭에서 옵션을 정의합니다.
◦ 연결(Link)
6. 별도의 CL 데이터(CL Data) 창을 열려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.7. 그래픽 창에서 공구 경로의 동적 미리 보기를 보려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.8. 필수 단계 요소를 정의한 후 공구 경로 검증에 대한 명령을 선택합니다.
◦ 공구 경로를 재생하려면  옆에 있는 화살표를 클릭하고 을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 공구 경로를 재계산하려면 옆에 있는 화살표를 클릭하고  을 선택합니다.
을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 참조 부품의 서피스에 대한 가우징 체크를 수행하려면 옆에 있는 화살표를 클릭하고  을 선택합니다.
을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 공구가 가공소재를 가공하는 동안 재료 제거 시뮬레이션을 보려면 옆에 있는 화살표를 클릭하고  을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.
을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.
옆에 있는 화살표를 클릭하고 을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.9. 다음 옵션 중 하나를 선택하여 시퀀스를 완료합니다.
◦ 변경을 저장하려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.◦ 공정 처리를 일시 중지하고 비동기 공구 중 하나를 사용하려면  을 클릭하고 다시 시작하려면
을 클릭하고 다시 시작하려면  을 클릭합니다.
을 클릭합니다.
을 클릭하고 다시 시작하려면 을 클릭합니다.◦ 변경을 취소하려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.참조(Reference) 탭
벽 참조 및 바닥 참조를 선택합니다. 가이드 커브에 대한 패턴 유형 및 입력을 정의합니다.
벽 참조(Wall References) 아래에서 다음 옵션을 설정합니다.
• 선택 유형(Selection type) - 벽 서피스 또는 이전 단계를 선택합니다.
◦ 서피스(Surface) - 개별 서피스를 선택하거나 세부 정보(Details)를 클릭하고 그래픽 창에서 서피스 세트를 선택합니다. 서피스를 제거하려면 마우스 오른쪽 버튼을 클릭하고 제거(Remove)를 선택합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭합니다. 바로 가기 메뉴에서 벽 서피스(Wall surface)를 선택한 다음 필요한 서피스를 선택합니다.
머시닝 측면의 방향을 선택하려면  을 클릭합니다. 퀼트 서피스를 선택하면 을 사용할 수 있습니다.
을 클릭합니다. 퀼트 서피스를 선택하면 을 사용할 수 있습니다.
을 클릭합니다. 퀼트 서피스를 선택하면 을 사용할 수 있습니다.◦ 이전 단계(Previous Step) - 벽 서피스로 사용할 서피스가 포함된 이전 단계를 선택합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭합니다. 바로 가기 메뉴에서 벽 참조(Wall References)를 선택한 다음 모델 트리에서 필요한 단계를 선택합니다.
바닥 참조(Floor References) 아래에서 다음 옵션을 설정합니다.
• 선택 유형(Selection type) - 바닥 서피스 또는 이전 단계를 선택합니다.
◦ 서피스(Surface) - 개별 서피스를 선택하거나 세부 정보(Details)를 클릭하고 그래픽 창에서 서피스 세트를 선택합니다. 서피스를 제거하려면 마우스 오른쪽 버튼을 클릭하고 제거(Remove)를 선택합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭합니다. 바로 가기 메뉴에서 바닥 서피스(Floor surface)를 선택한 다음 필요한 옵션을 선택합니다.
머시닝 측면의 방향을 선택하려면 을 클릭합니다. 퀼트 서피스를 선택하면 을 사용할 수 있습니다.
을 클릭합니다. 퀼트 서피스를 선택하면 을 사용할 수 있습니다.◦ 이전 단계(Previous Step) - 바닥 서피스로 사용할 서피스가 포함된 이전 단계를 선택합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭합니다. 바로 가기 메뉴에서 바닥 참조(Floor References)를 선택한 다음 모델 트리에서 필요한 단계를 선택합니다.
벽과 바닥에 동일한 서피스를 선택한 경우 서피스의 교차를 기반으로 공구 경로가 생성됩니다. 이러한 공구 경로는 일부 패턴 유형(Pattern type) 옵션이나 일부 입력(Input) 옵션에는 적합하지 않을 수 있습니다. 따라서 최적의 공구 경로를 위해 벽과 바닥에 대해 서로 다른 서피스를 선택하는 것이 좋습니다. |
최적의 공구 경로 생성을 위해 벽 및 바닥 서피스가 분해되지 않아야 합니다. |
가이드 커브(Guide Curves)에서 다음 옵션을 설정합니다.
• 패턴 유형(Pattern type) - 공구 경로의 패턴을 선택합니다. 또한 입력(Input) 목록에서 패턴 유형에 해당하는 입력을 선택합니다.
◦ 가이드 커브에서 오프셋(Offset from guide curves)(기본값) - 공구 경로에서 슬라이스는 제공된 입력에 따라 가이드 커브에서 오프셋됩니다.
입력(Input) 옵션은 다음과 같습니다.
▪ 바닥 커브(Floor curve)(기본값) - 바닥 서피스의 경계를 기준으로 가이드 커브를 자동으로 정의합니다.
▪ 천장 커브(Ceiling curve) - 벽 서피스 천장 경계를 토대로 가이드 커브를 자동으로 정의합니다.
▪ 사용자 정의(User defined) - 선택한 참조를 토대로 가이드 커브를 정의합니다. 이 옵션은 벽 컬렉터와 바닥 컬렉터가 모두 정의된 경우 사용할 수 있습니다. 사용자 정의 가이드 커브는 머시닝 서피스에 있어야 합니다.
◦ 두 커브 간 머프(Morph between two curves) - 공구 경로는 한 가이드 커브에서 다른 가이드 커브로 머프됩니다.
입력(Input) 옵션은 다음과 같습니다.
▪ 자동(Automatic)(기본값) - 바닥 서피스의 경계와 벽 서피스의 천장을 토대로 가이드 커브를 자동으로 정의합니다.
▪ 사용자 정의(User defined) - 커브 또는 모서리를 수동으로 선택하여 가이드 커브로 사용합니다. 생성된 공구 경로는 이러한 가이드 커브를 기반으로 합니다. 열린 커브 또는 닫힌 커브를 선택하거나 이러한 커브의 조합을 선택할 수 있습니다. 세부 정보(Details)를 사용하여 가이드 커브를 선택할 수도 있습니다. 이 옵션은 벽 컬렉터와 바닥 컬렉터가 모두 정의된 경우 사용할 수 있습니다. 사용자 정의 가이드 커브는 머시닝 서피스에 있어야 합니다.
입력(Input)이 사용자 정의(User defined)로 선택된 두 커브 간 머프(Morph between two curves)를 사용하려면 정확히 두 개의 가이드 커브에서 하나의 공구 경로를 생성해야 합니다. 공구 경로는 선택한 가이드 커브 순서에 관계없이 위에서 아래로 시작됩니다. |
여러 벽 서피스를 선택하는 경우 모든 서피스에 대한 가이드 커브를 정의하거나 모든 벽 서피스를 통과하는 가이드 커브를 선택합니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭합니다. 패턴 유형(Pattern Type)을 선택한 다음 필요한 옵션을 선택합니다. 마찬가지로 입력(Input)을 선택한 다음 필요한 옵션을 선택합니다.
매개 변수(Parameters) 탭
필요한 제조 매개 변수를 지정합니다.  을 클릭하여 이전 단계에서 매개 변수를 복사하거나
을 클릭하여 이전 단계에서 매개 변수를 복사하거나  을 클릭하여 벽 5축 마무리 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다. 매개 변수에 대한 자세한 내용은 컷 깊이 및 여유에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 및 절삭 동작에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 항목을 참조하십시오.
을 클릭하여 벽 5축 마무리 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다. 매개 변수에 대한 자세한 내용은 컷 깊이 및 여유에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 및 절삭 동작에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 항목을 참조하십시오.
을 클릭하여 이전 단계에서 매개 변수를 복사하거나 을 클릭하여 벽 5축 마무리 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다. 매개 변수에 대한 자세한 내용은 컷 깊이 및 여유에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 및 절삭 동작에 대한 벽 5축 마무리 및 바닥 5축 마무리 매개 변수 항목을 참조하십시오.또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 매개 변수(Parameters)를 선택합니다.
클리어런스(Clearance) 탭
공구 경로에서 공구 리트랙트 및 공구의 시작점과 끝점을 정의합니다.
• 리트랙트(Retract) - 공구 리트랙트의 옵션을 정의합니다.
◦ 유형(Type)
▪ 자동(Automatic)(기본값) - 공구 경로가 자동으로 공구 리트랙트를 생성합니다. 따라서 참조(Reference), 방향(Orientation) 및 값(Value)과 같은 추가 입력을 적용할 수 없습니다.
▪ 평면(Plane)
▪ 원통(Cylinder)
▪ 구(Sphere)
◦ 참조(Reference)
◦ 방향(Orientation)
◦ 값(Value)
• 시작점 및 끝점(Start and End Points) - 공구 경로의 시작점(Start point) 및 끝점(End point)을 선택합니다.
축 제어(Axis Control) 탭
공구 접점, 리드 각도 및 기울기 각도 설정을 정의합니다.
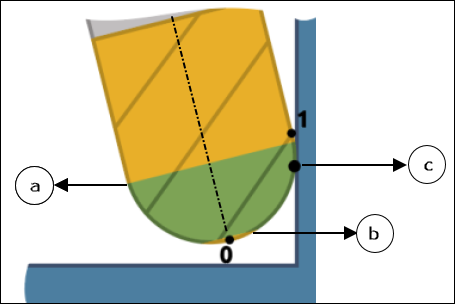
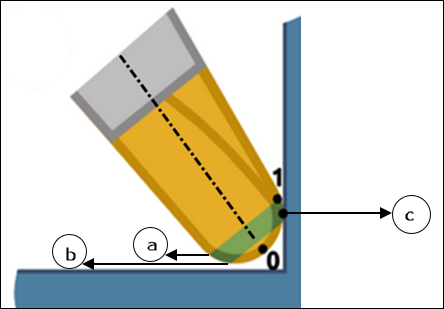
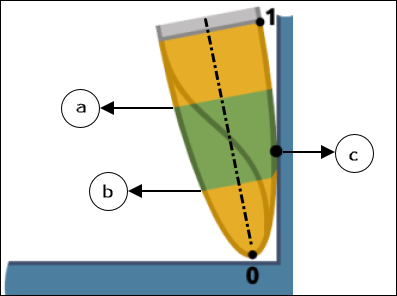
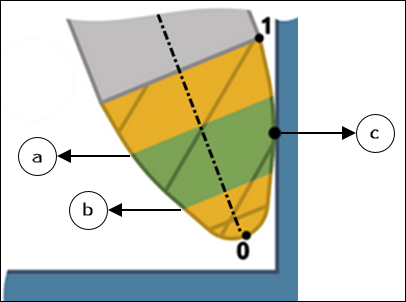
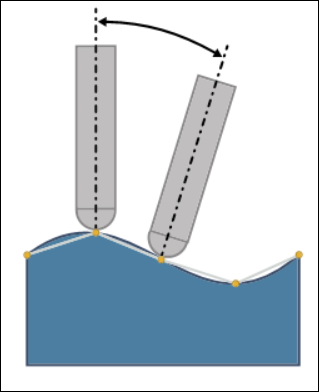
• 공구 프로파일의 상대 접점 높이(Relative Contact Point Height on Tool Profile)에서 다음 옵션을 설정합니다.
◦ 기본 설정 높이(Preferred height) - 공구가 서피스에 접선 방향으로 정렬되는 공구에서 기본 설정 접점을 지정합니다. 범위는 0에서 1까지입니다. 각 항목은 다음과 같습니다.
▪ 0은 최소 높이의 하한값을 나타냅니다.
▪ 1은 최대 높이의 상한값을 나타냅니다.
기본값은 0.5입니다.
기본 설정 높이(Preferred height)는 최소 높이(Minimum height)와 최대 높이(Maximum height) 사이여야 합니다. |
◦ 최소 높이(Minimum height) - 충돌을 피하기 위해 공구가 서피스에 접선 방향으로 정렬되는 공구에서 접점의 최소 높이를 지정합니다. 범위는 0에서 기본 설정 높이(Preferred height) 값까지입니다. 0은 최소 높이의 하한값을 나타냅니다.
기본값은 0.4입니다.
◦ 최대 높이(Maximum height) - 충돌을 피하기 위해 공구가 서피스에 접선 방향으로 정렬되는 공구에서 접점의 최대 높이를 지정합니다. 범위는 기본 설정 높이(Preferred height) 값에서 1까지입니다. 1은 최대 높이의 상한값을 나타냅니다.
기본값은 0.6입니다.
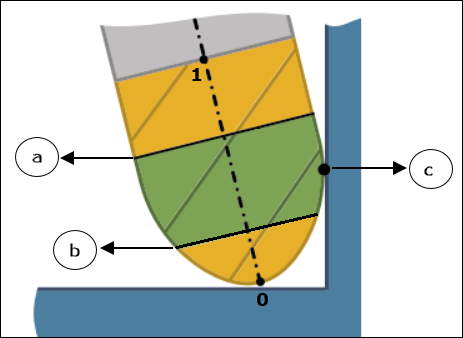
a - 정의된 최대 높이
b - 정의된 최소 높이
c - 기본 설정 높이
정의된 최소 높이(Minimum height) 및 정의된 최대 높이(Maximum height)의 지정된 범위에서 충돌을 피할 수 없으면 공구 경로가 트림됩니다. |
a로 표현되는 정의된 최대 높이, b로 표현되는 정의된 최소 높이, 그리고 c로 표현되는 기본 설정 높이는 최소 높이(Minimum height)의 하한값 비율과 최대 높이(Maximum height)의 상한값 비율에 해당합니다.
다음 이미지는 공구 경로 계산 중에 고려되는 지원되는 공구에 대해 최소 높이(Minimum height)의 하한값이 0이고 최대 높이(Maximum height)의 상한값이 1이라는 것을 보여줍니다.
◦ Ball Mill
◦ Taper Ball Mill
◦ Barrel Tangent
◦ Barrel Taper
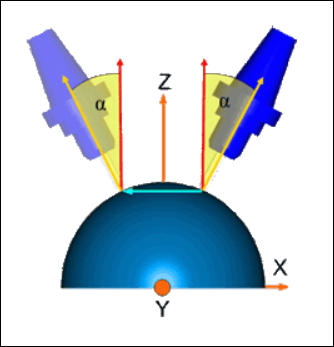
• 서피스 법선에 대한 리드 각도(Lead Angle Relative to Surface Normal)에서 다음 옵션을 설정합니다.
◦ 기본 설정 리드 각도(Preferred lead angle) - 공구 축과 서피스 법선 사이의 기본 설정 각도를 지정합니다. 서피스 법선은 0도로 간주됩니다. 범위는 -90도 이상에서 90도 미만입니다.
기본값은 0도입니다.
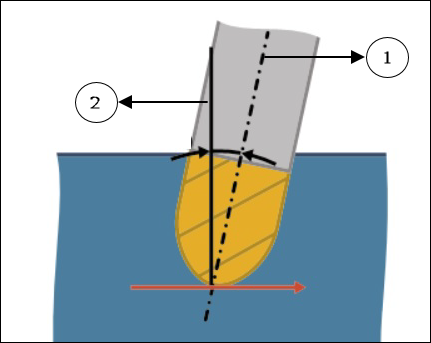
1. 공구 축
2. 서피스 법선
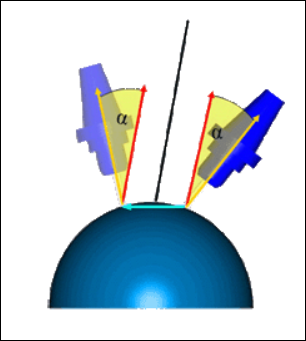
◦ 최소 리드 각도(Minimum lead angle) - 충돌을 피하기 위해 공구가 기울어지는 최소 리드 각도를 지정합니다. 범위는 -90도 이상에서 기본 설정 리드 각도(Preferred lead angle) 값 미만입니다.
기본값은 -45도입니다.
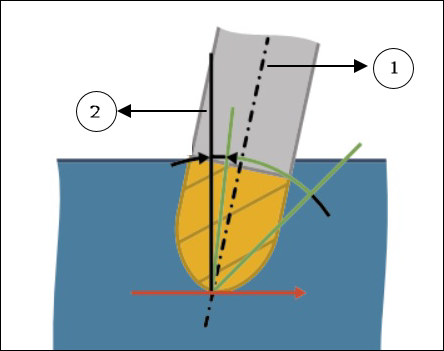
1. 공구 축
2. 서피스 법선
◦ 최대 리드 각도(Maximum lead angle) - 충돌을 피하기 위해 공구가 기울어지는 최대 리드 각도를 지정합니다. 범위는 기본 설정 리드 각도(Preferred lead angle) 값에서 90도 미만입니다.
기본값은 45도입니다.
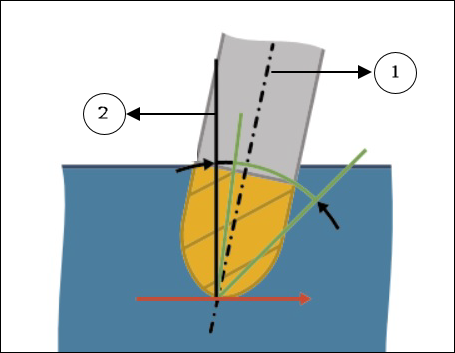
1. 공구 축
2. 서피스 법선
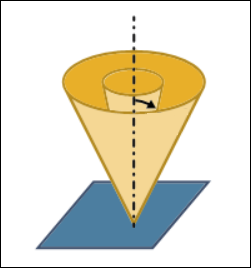
• 각도 범위(Angle Range)에서 최대 각도 단계(Maximum angle step)를 정의합니다. 이는 두 연속 공구 경로 위치 간에 허용되는 최대 각도 변경입니다. 0도보다 큰 각도를 지정합니다.
기본값은 3도입니다.
• 필요한 경우 기울기 각도 범위(Tilt Angle Range) 확인란을 선택하여 머신의 제한에 따라 공구 기울기를 추가로 제한합니다. 다음 기울기 옵션을 정의합니다.
◦ 참조 축(Reference axis) - Z축(Z axis) 또는 사용자 정의 축(Custom axis)을 선택합니다.
Z축이 기본 선택입니다. 단계 방향의 동일한 z축입니다.
사용자 정의 축(Custom axis)의 경우 공구가 기울기를 제한하는 축을 선택합니다.
요구사항에 따라 축 방향을 대칭 이동하려면 을 클릭합니다.
을 클릭합니다.최대 기울기 각도와 최소 기울기 각도는 선택한 축을 기준으로 고려됩니다.
◦ 최소 기울기 각도(Minimum tilt angle) - 참조 축에서 서피스 법선을 향한 최소 기울기 각도를 지정합니다. 범위는 0도에서 180도입니다.
기본값은 0도입니다.
◦ 최대 기울기 각도(Maximum tilt angle) - 참조 축에서 서피스 법선을 향한 최대 기울기 각도를 지정합니다. 범위는 0도에서 180도입니다.
기본값은 180도입니다.
연결(Link) 탭
리드 및 링크 유형을 정의합니다.
• 리드(Lead)의 리드 반지름(Lead Radius)에서 호 반지름을 공구 지름의 백분율 또는 절대값으로 지정합니다. 기본 호 반지름은 공구 지름의 25%입니다.
• 링크(Links)에서 큰 간격(Large gaps) 옵션을 사용하여 연결 유형을 정의합니다. 간격은 머시닝 서피스 형태의 피쳐와 선택한 공구 경로 유형에 의해 발생합니다.
다음 유형의 큰 간격을 선택할 수 있습니다.
◦ 블렌드 스플라인을 포함한 클리어런스(Clearance with blend spline) - 큰 간격 간의 연결과 공구의 리트랙트에 대한 탄젠트 호입니다.
◦ 클리어런스로 리트랙트(Retract to Clearance) - 공구가 지정된 클리어런스 영역으로 리트랙트하는 직선 연결입니다. 리트랙트 공구는 클리어런스(Clearance) 탭에 정의된 리트랙트를 사용합니다.
좁은 간격 크기(Small gaps size) 옵션에서 간격을 결정하기 위한 임계값을 지정합니다. 정의된 임계값보다 더 큰 간격은 큰 간격으로 간주됩니다. 좁은 간격 크기를 공구 지름의 백분율 또는 절대값으로 지정할 수 있습니다. 기본값은 공구 지름의 20%입니다.
체크 서피스(Check Surfaces) 탭
공구 경로를 디가우징할 부품 및 서피스를 정의합니다.
• 참조 부품 추가(Add reference parts) - 참조 부품을 가우징 없는 공구 경로에 대한 체크 서피스로 추가하려면 이 확인란을 선택합니다.
• 체크 서피스(Check surfaces) - 체크 서피스(Check surfaces) 컬렉터에서 공구 경로를 디가우징할 서피스, 고정장치 또는 참조를 추가합니다.
• 클리어런스 확인(Check clearance) - 선택한 체크 서피스에 대한 클리어런스를 지정합니다.
기본값은 0입니다.
클리어런스 확인(Check clearance)은 체크 서피스를 정의한 후에만 사용할 수 있습니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 체크 서피스(Check Surfaces)를 선택합니다.
• 체크 서피스로 선택된 서피스가 없으면 공구 경로는 가우징 또는 충돌을 확인하지 않습니다. • 공구 경로 계산 성능은 공구 경로가 정의된 모든 체크 서피스에 대한 가우징 체크 및 충돌 확인을 수행하므로 정의된 체크 서피스의 총 수에 따라 달라집니다. 최상의 성능을 위해 필요한 체크 서피스만 선택합니다. |
옵션(Options) 탭
절삭 공구 어댑터로 사용할 부품 또는 어셈블리를 엽니다. 또는  을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.
을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.
을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.공구 동작(Tool Motions) 탭
이동 점 공구 동작을 생성하려면 이동 점(Goto Point)을 선택합니다. 자세한 내용은 이동 점 공구 동작 생성하기를 참조하십시오.
공구 경로를 따라 CL 명령을 삽입하려면 CL 명령(CL Command)을 선택합니다. 자세한 내용은 공구 동작을 위한 CL 명령 삽입하기를 참조하십시오.
공구 동작(Tool Motions) 탭은 가공 참조를 정의할 경우에만 표시됩니다. |
공정 처리(Process) 탭
머시닝 스텝에 대해 다음 옵션 중 하나를 사용합니다.
• 계산된 시간(Calculated Time) - 단계의 가공 시간을 자동으로 계산하려면  을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.
을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.
을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.• 실제 시간(Actual Time) - 가공 시간을 지정합니다.
특성(Properties) 탭
스텝에 대한 이름 또는 설명을 지정합니다.
• 이름(Name) - 단계의 이름을 표시합니다. 다른 이름을 표시할 수 있습니다.
• 설명(Comments) - 단계와 연관된 설명을 텍스트 상자에 입력하거나 다음 옵션을 사용합니다.
◦  - 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.
- 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.
- 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.◦  - 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.
- 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.
- 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.◦  - 현재 단계 설명을 텍스트 파일에 저장합니다.
- 현재 단계 설명을 텍스트 파일에 저장합니다.
- 현재 단계 설명을 텍스트 파일에 저장합니다.◦  - 현재 단계 설명을 적용합니다.
- 현재 단계 설명을 적용합니다.
- 현재 단계 설명을 적용합니다.