고속 밀링 4축 로터리 황삭 시퀀스 생성하기
4축 로터리 황삭 시퀀스를 정의하여 복합 로터리 부품에 황삭 공구 경로를 생성합니다.
활성 작업이 4 또는 5축 밀링 또는 밀링/선반가공 작업 센터를 참조하는지 확인합니다.
|
|
밀링/선반가공 작업 센터에서의  고속 밀링 4축 로터리 황삭(HSM 4 Axis Rotary Rough) 명령은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. 고속 밀링 4축 로터리 황삭(HSM 4 Axis Rotary Rough) 명령은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. |
1. > > 고속 밀링 4축 로터리 황삭(HSM 4 Axis Rotary Rough)을 클릭합니다. 로터리 황삭(Rotary Rough) 탭이 열립니다.
고속 밀링 4축 로터리 황삭(HSM 4 Axis Rotary Rough)을 클릭합니다. 로터리 황삭(Rotary Rough) 탭이 열립니다.2.  공구 관리자(Tool Manager)를 클릭하거나 공구(Tool) 목록에서
공구 관리자(Tool Manager)를 클릭하거나 공구(Tool) 목록에서  공구 편집(Edit Tools)을 선택하여 공구 설정(Tools Setup) 대화 상자를 열고 새 절삭 공구를 추가하거나 공구 매개 변수를 변경합니다. 공구 목록에는 단계에 적합한 공구만 포함되어 있습니다.
공구 편집(Edit Tools)을 선택하여 공구 설정(Tools Setup) 대화 상자를 열고 새 절삭 공구를 추가하거나 공구 매개 변수를 변경합니다. 공구 목록에는 단계에 적합한 공구만 포함되어 있습니다.
공구 관리자(Tool Manager)를 클릭하거나 공구(Tool) 목록에서 공구 편집(Edit Tools)을 선택하여 공구 설정(Tools Setup) 대화 상자를 열고 새 절삭 공구를 추가하거나 공구 매개 변수를 변경합니다. 공구 목록에는 단계에 적합한 공구만 포함되어 있습니다.가공 공구의 현재 단계 및 활성 헤드에 대한 공구를 표시하려면 INCLUDE_ALL_TOOLS_IN_LIST 옵션을 YES로 설정합니다. |
이 시퀀스에 대해 지원되는 도구는 다음과 같습니다.
◦ End Mill(기본값)
◦ Ball Mill
◦ Bull Nose Mill
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 공구(Tools)를 선택합니다.
3. 절삭 공구와 해당 방향을 그래픽 창에서 미리 보려면 공구(Tool) 목록 옆에 있는  공구 미리 보기(Tool Preview)를 클릭합니다.
공구 미리 보기(Tool Preview)를 클릭합니다.
공구 미리 보기(Tool Preview)를 클릭합니다.| 공구 미리 보기(Tool Preview) 버튼은 공구를 선택한 후에 사용할 수 있습니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 공구 미리 보기(Tool Preview) 옵션을 선택합니다. 공구를 선택한 후 그래픽 창의 바로 가기 메뉴에서 공구 미리 보기(Tool Preview) 옵션을 사용할 수 있습니다.
공구 미리 보기를 종료하려면 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 공구 미리 보기 취소(Cancel tool preview)를 선택하거나 공구 미리 보기(Tool Preview)를 다시 클릭합니다.
공구 미리 보기(Tool Preview)를 다시 클릭합니다.4. 단계의 방향을 정의하는 좌표계를 변경하려면  에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.
에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.
에 인접한 컬렉터를 클릭하고 좌표계를 선택합니다. 작업 좌표계가 단계 좌표계와 다른 경우 다음 명령에 대한 컬렉터를 마우스 오른쪽 버튼으로 클릭합니다.◦ 기본값(Default) - 선택한 좌표계를 기본 참조로 대체합니다. 기본값은 이전 단계나 작업에서 복사된 방향입니다.
◦ 정보(Information) - 선택한 좌표계에 대한 정보를 표시합니다.
작업 센터 설정에 두 개의 스핀들이 있는 경우 목록에서 기본 스핀들(Main Spindle) 또는 하위 스핀들(Sub Spindle)을 선택하고 각 기본 스핀들 및 하위 스핀들에 대한 좌표계를 선택합니다.
하위 스핀들은 Complete Machining 기반 몰드 머시닝 라이선스와 ModuleWorks 기반 몰드 머시닝 라이선스가 모두 있을 때 사용할 수 있습니다. NC 시퀀스에 대해 지정한 좌표계는 변경할 때까지 유효합니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 방향(Orientation)을 선택합니다.
5. 다음 탭에서 옵션을 정의합니다.
6. 별도의 CL 데이터(CL Data) 창을 열려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.7. 그래픽 창에서 공구 경로의 동적 미리 보기를 보려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.8. 필수 단계 요소를 정의한 후 공구 경로 검증에 대한 명령을 선택합니다.
◦ 공구 경로를 재생하려면  옆에 있는 화살표를 클릭하고 을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 공구 경로를 재계산하려면 옆에 있는 화살표를 클릭하고  을 선택합니다.
을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 참조 부품의 서피스에 대한 가우징 체크를 수행하려면 옆에 있는 화살표를 클릭하고  을 선택합니다.
을 선택합니다.
옆에 있는 화살표를 클릭하고 을 선택합니다.◦ 공구가 가공소재를 가공하는 동안 재료 제거 시뮬레이션을 보려면 옆에 있는 화살표를 클릭하고  을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.
을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.
옆에 있는 화살표를 클릭하고 을 선택합니다. 통합 시뮬레이션 환경의 재료 제거(Material Removal) 탭이 열립니다.9. 다음 옵션 중 하나를 선택하여 시퀀스를 완료합니다.
◦ 변경을 저장하려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.◦ 공정 처리를 일시 중지하고 비동기 공구 중 하나를 사용하려면  을 클릭하고 다시 시작하려면
을 클릭하고 다시 시작하려면  을 클릭합니다.
을 클릭합니다.
을 클릭하고 다시 시작하려면 을 클릭합니다.◦ 변경을 취소하려면  을 클릭합니다.
을 클릭합니다.
을 클릭합니다.참조(References) 탭
참조 부품과 스톡 참조를 선택합니다. 필요한 경우 머시닝 영역과 구속 루프를 정의합니다.
다음 옵션을 정의합니다.
• 참조 모델(Reference model) - 단일 바디 또는 다중 바디로 구성된 로터리 부품을 선택하거나 로터리 황삭 단계에 사용할 로터리 부품의 바디를 선택합니다.
제조 어셈블리에 단일 참조 부품만 포함된 경우 해당 부품이 기본적으로 선택됩니다. 다중 참조 부품의 경우 가공할 필요한 참조 부품을 선택해야 합니다. |
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 참조 모델(Reference Model)을 선택합니다.
• 스톡 참조(Stock reference) - 스톡 참조를 선택합니다. 단일 또는 다중 가공소재의 경우 가공소재(Workpiece)가 기본 옵션입니다. 가공소재가 없는 경우 경계 원통(Bound cylinder)이 기본 옵션입니다.
◦ 가공소재(Workpiece) - 스톡 참조로 사용할 가공소재를 정의합니다.
제조 어셈블리에 단일 가공소재만 포함된 경우 해당 부품이 기본적으로 선택됩니다. 다중 가공소재의 경우 필요한 가공소재를 선택해야 합니다. |
◦ 경계 원통(Bound cylinder) - 자동으로 생성된 경계 원통을 선택한 참조 부품의 스톡 참조로 사용합니다.
◦ 황삭 스톡 파일(Rough stock file) - 스톡 참조로 사용할 황삭 스톡 파일을 선택합니다.
◦ 스톡 모델(Stock model) - 스톡 참조로 사용할 스톡 모델을 선택합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 스톡 참조(Stock reference)를 선택한 다음 가공소재(Workpiece), 경계 원통(Bound cylinder) 또는 황삭 스톡 파일(Rough stock file)을 선택합니다.
• 가공 영역(Machining Area) - 필요한 경우 다음 옵션을 설정합니다.
◦ 축(Axial) - 회전 축을 따라 머시닝 영역을 제한할 축 한계를 입력합니다.
▪ 시작(Start) - 머시닝 영역의 축 하한값을 입력합니다.
▪ 끝(End) - 머시닝 영역의 축 상한값을 입력합니다.
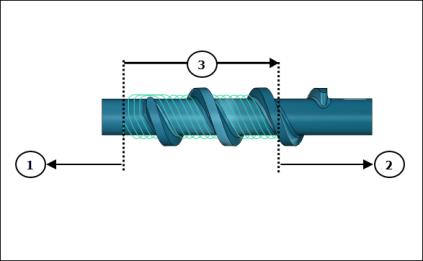
1. 축 시작
2. 축 끝
3. 축 머시닝 영역
◦ 레이디얼(Radial) - 부품의 지름을 따라 머시닝 영역 제한할 레이디얼 한계를 입력합니다.
▪ 시작(Start) - 머시닝 영역의 레이디얼 하한값을 입력합니다.
▪ 끝(End) - 머시닝 영역의 레이디얼 상한값을 입력합니다.
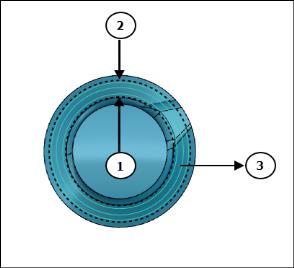
1. 레이디얼 시작
2. 레이디얼 끝
3. 레이디얼 머시닝 영역
• 구속 루프(Containment Loops) - 필요에 따라 컬렉터에서 개별 닫힌 루프를 선택하거나 세부 정보(Details)를 클릭하고 루프 체인을 선택합니다. 선택한 루프가 참조 부품 서피스에 없는 경우 참조 부품 서피스에 수직으로 투영되고 루프 내의 영역이 가공됩니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 구속 루프(Containment Loops)를 선택합니다.
머시닝 측면을 반전시키고 선택한 구속 루프 외부에 공구 경로를 생성하기 위해 구속 영역을 대칭 이동하려면  을 클릭합니다. 닫힌 루프를 선택한 경우 을 사용할 수 있습니다.
을 클릭합니다. 닫힌 루프를 선택한 경우 을 사용할 수 있습니다.
을 클릭합니다. 닫힌 루프를 선택한 경우 을 사용할 수 있습니다.
매개 변수(Parameters) 탭
필요한 제조 매개 변수를 지정합니다.  을 클릭하여 이전 단계에서 매개 변수를 복사하거나
을 클릭하여 이전 단계에서 매개 변수를 복사하거나  을 클릭하여 로터리 황삭 시퀀스 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다.
을 클릭하여 로터리 황삭 시퀀스 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다.
을 클릭하여 이전 단계에서 매개 변수를 복사하거나 을 클릭하여 로터리 황삭 시퀀스 관련 매개 변수를 편집할 수도 있습니다. 기본적으로 선택한 공구의 필수 매개 변수는 관계식(Relations) 대화 상자에서 수정할 수 있는 관계식에 의해 정의됩니다.또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 매개 변수(Parameters)를 선택합니다.
로터리 황삭 시퀀스 관련 매개 변수에 대한 자세한 내용은 로터리 황삭 시퀀스 및 로터리 마무리 시퀀스 매개 변수를 참조하십시오.
클리어런스(Clearance) 탭
필요에 따라 다음을 지정합니다.
• 리트랙트(Retract) - RAPID_DISTANCE의 정의된 값에 따라 공구가 자동으로 리트랙트됩니다.
• 시작점 및 끝점(Start and End Points) - 공구 경로의 시작점(Start point) 및 끝점(End point)을 지정합니다.
또는 그래픽 창을 마우스 오른쪽 버튼으로 클릭하고 바로 가기 메뉴에서 시작점(Start Point)과 끝점(End Point)을 선택하여 공구 경로의 시작점과 끝점을 선택합니다.
축 제어(Axis Control) 탭
공구 기울기 옵션을 정의합니다.
다음 옵션을 설정합니다.
• 회전 축(Axis of rotation) - Z축(Z axis) 또는 사용자 정의 축(Custom axis)을 선택합니다.
◦ Z축(Z axis)(기본값) - 이는 단계 방향의 Z축과 동일합니다. 공구는 Z축에 수직입니다.
◦ 사용자 정의 축(Custom axis) - 공구가 기울어지는 축을 선택합니다. 공구는 선택한 사용자 정의 축에 수직입니다.
• 원추 각도(Cone angle) - 원추의 회전 축과 바깥쪽 라인 사이의 각도를 입력합니다. 공구 방향은 지정한 값에 수직입니다.
링크(Links) 탭
그룹 내, 그룹 간, 슬라이스 간 또는 영역 간의 연결 유형을 정의합니다.
• 그룹 내 링크(Link within a group) - 단일 그룹 내에서 컷 사이의 연결 유형을 정의합니다.
◦ 직접(Direct) - 어떠한 리트랙트 동작 없이 최단 연결을 사용합니다.
◦ 클리어런스 거리로 리트랙트(Retract to clear distance)(기본값) - 공구를 리트랙트하고 그룹 내의 다음 컷에 연결하기 위해 CLEAR_DIST 매개 변수를 사용합니다.
◦ 급속 거리로 리트랙트(Retract to rapid distance) - 공구를 리트랙트하고 그룹 내의 다음 컷에 연결하기 위해 RAPID_DISTANCE 매개 변수를 사용합니다.
• 그룹 간 링크(Link between groups) - 동일한 절삭 레이어의 단일 그룹 내 다른 그룹 사이의 연결 유형을 정의합니다.
◦ 직접(Direct) - 다른 그룹을 연결하기 위해 어떠한 리트랙트 동작 없이 최단 연결을 사용합니다.
◦ 클리어런스 거리로 리트랙트(Retract to clear distance) - 공구를 리트랙트하고 다음 그룹에 연결하기 위해 CLEAR_DIST 매개 변수를 사용합니다.
◦ 급속 거리로 리트랙트(Retract to rapid distance) (기본값) - 공구를 리트랙트하고 다음 그룹에 연결하기 위해 RAPID_DISTANCE 매개 변수를 사용합니다.
• 슬라이스 간 링크(Link between slices) - 동일한 영역 내 절삭 깊이 간 연결 유형을 정의합니다.
◦ 직접(Direct) - 다음 슬라이스를 연결하기 위해 어떠한 리트랙트 동작 없이 최단 연결을 사용합니다.
◦ 클리어런스 거리로 리트랙트(Retract to clear distance)(기본값) - 공구를 리트랙트하고 다음 슬라이스에 연결하기 위해 CLEAR_DIST 매개 변수를 사용합니다.
◦ 급속 거리로 리트랙트(Retract to rapid distance) - 공구를 리트랙트하고 다음 슬라이스에 연결하기 위해 RAPID_DISTANCE 매개 변수를 사용합니다.
• 영역 간 링크(Link between regions) - 다른 영역 사이의 연결 유형을 정의합니다.
◦ 직접(Direct) - 다른 영역을 연결하기 위해 어떠한 리트랙트 동작 없이 최단 연결을 사용합니다.
◦ 클리어런스 거리로 리트랙트(Retract to clear distance) - 공구를 리트랙트하고 다음 영역에 연결하기 위해 CLEAR_DIST 매개 변수를 사용합니다.
◦ 급속 거리로 리트랙트(Retract to rapid distance)(기본값) - 공구를 리트랙트하고 다음 영역에 연결하기 위해 RAPID_DISTANCE 매개 변수를 사용합니다.
옵션(Options) 탭
절삭 공구 어댑터로 사용할 부품 또는 어셈블리를 엽니다. 또는  을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.
을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.
을 클릭하여 다른 단계에서 절삭 공구 어댑터를 복사합니다.공구 동작(Tool Motions) 탭
이동 점 공구 동작을 생성하려면 이동 점(Goto Point)을 선택합니다. 자세한 내용은 이동 점 공구 동작 생성하기를 참조하십시오.
공구 경로를 따라 CL 명령을 삽입하려면 CL 명령어(CL Command)를 선택합니다. 자세한 내용은 공구 동작을 위한 CL 명령 삽입하기를 참조하십시오.
공구 동작(Tool Motions) 탭은 가공 참조를 정의할 경우에만 표시됩니다. |
공정 처리(Process) 탭
가공 스텝에 대해 다음 옵션 중 하나를 사용합니다.
• 계산된 시간(Calculated Time) - 단계의 가공 시간을 자동으로 계산하려면  을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.
을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.
을 클릭합니다. 계산된 시간(Calculated Time) 상자에 시간이 표시됩니다.• 실제 시간(Actual Time) - 가공 시간을 지정합니다.
특성(Properties) 탭
스텝에 대한 이름 또는 설명을 지정합니다.
• 이름(Name) - 단계의 이름을 표시합니다. 다른 이름을 표시할 수 있습니다.
• 설명(Comments) - 단계와 연관된 설명을 텍스트 상자에 입력하거나 다음 옵션을 사용합니다.
◦  - 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.
- 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.
- 단계 설명이 포함된 기존 텍스트 파일을 읽어와 현재 단계 설명을 대체합니다.◦  - 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.
- 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.
- 단계 설명이 포함된 기존 텍스트 파일의 내용을 커서 위치에 삽입합니다. 모든 현재 단계 설명을 유지합니다.◦  - 현재 단계 설명을 텍스트 파일에 저장합니다.
- 현재 단계 설명을 텍스트 파일에 저장합니다.
- 현재 단계 설명을 텍스트 파일에 저장합니다.◦  - 현재 단계 설명을 적용합니다.
- 현재 단계 설명을 적용합니다.
- 현재 단계 설명을 적용합니다.