Link delle azioni del processo
I link delle azioni connettono tra loro i nodi di attività in modo da creare una sequenza.

Nella forma più semplice, i link si limitano a indicare al workflow l'operazione successiva da eseguire dopo un evento. Quando a un'attività corrispondono più risultati possibili, i link consentono di configurare l'operazione successiva a seconda di come viene completata l'attività.
Ad eccezione del nodo Inizio, tutti i nodi devono disporre di un link in ingresso per essere inclusi nel workflow.
Una volta aggiunto un nodo, è necessario collegarlo a un altro nodo.
1. Selezionare lo strumento di collegamento
.
| Non è possibile aggiungere link mentre un nodo è selezionato. In caso di problemi con l'aggiunta di un link, verificare che non sia selezionato alcun nodo. I nodi selezionati sono contrassegnati da un bordo nero. |
2. Fare clic sul primo nodo e trascinare il cursore verso il secondo.
3. Una volta raggiunto con il cursore il secondo nodo, rilasciare il pulsante del mouse.
Vedere gli esempi riportati di seguito.
Link di base | Link delle azioni del processo quando si utilizzano gli stati del ciclo di vita delle azioni del processo di default. |
Link di eventi di instradamento | Link delle azioni del processo per le attività che includono eventi di instradamento personalizzati. |
Loop link | Impostazione dell'opzione Loop link nelle proprietà del link. |
Link di base
Il link più basilare si limita a indicare che al termine di un evento può iniziare il successivo. È inoltre possibile creare link per altre azioni del workflow. Ad esempio, è possibile specificare che un evento deve essere interrotto se un'attività specifica viene sospesa.
Si consideri l'esempio seguente:
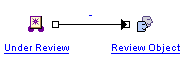
1. Si creano i nodi descritti di seguito.
◦ "In esame": un method robot imposta automaticamente lo stato del ciclo di vita dell'oggetto su In esame. Non è richiesta alcuna interazione da parte dell'utente.
◦ "Review Object": questo task viene assegnato a un singolo utente affinché esamini l'oggetto.
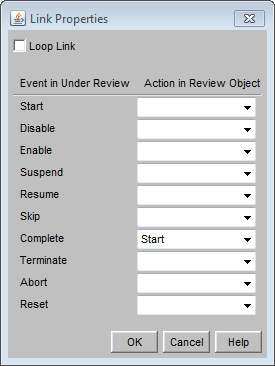
2. Si crea un link di base tra i due nodi.
3. Fare doppio clic sul link per aprire la finestra Proprietà link.
In questo modo, non appena il method robot completa il proprio task (ponendo l'oggetto nello stato del ciclo di vita In esame), un nuovo task "Review Object" viene automaticamente creato e assegnato all'utente.
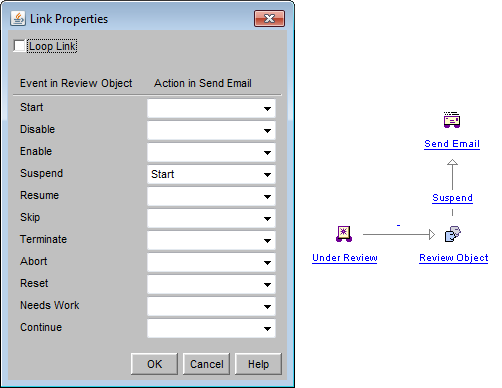
4. È possibile utilizzare le opzioni aggiuntive disponibili nella finestra Proprietà link per un workflow più complesso, che in genere include connessioni di instradamento o azioni di amministrazione del workflow.
Ad esempio, un utente dotato dei permessi appropriati può utilizzare le azioni di
Gestione processi di workflow per sospendere un nodo. È quindi possibile utilizzare gli eventi del link affinché venga inviato un messaggio e-mail al project manager in caso di sospensione dell'attività.
Link di eventi di instradamento
Alle attività sono in genere associati eventi di instradamento. Per ulteriori informazioni, vedere
Scheda Eventi di instradamento.
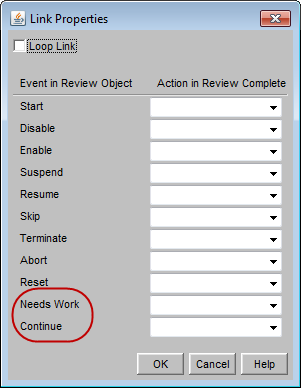
Ad esempio, si può decidere di offrire all'utente di "Review Object" due opzioni al termine del task: "Needs Work" e "Continua".
Quando si configurano link in uscita dall'attività, l'opzione Completa non è più disponibile. Vengono invece visualizzati gli eventi di instradamento.
È necessario configurare un link in uscita per ogni evento di instradamento personalizzato. Ad esempio, è possibile specificare che se l'utente seleziona "Needs Work" l'oggetto passa allo stato del ciclo di vita In corso. Se l'utente seleziona "Continua", l'oggetto passa allo stato del ciclo di vita Review Complete.
Loop link
È possibile utilizzare un loop link per le sezioni del workflow che potrebbe essere necessario rivisitare più volte. Un loop link reimposta tutti i nodi nel relativo percorso, consentendo di eseguire più volte i nodi.
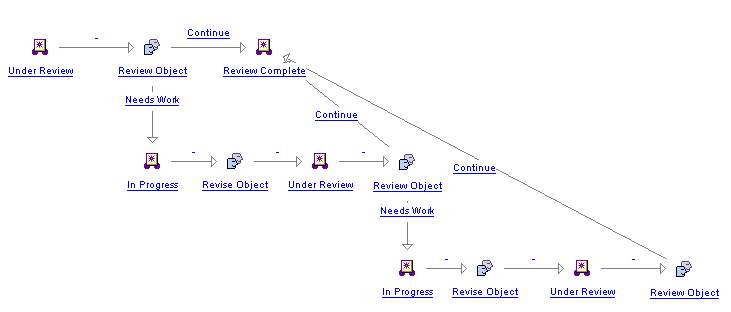
Il workflow può ad esempio includere la serie di eventi descritta di seguito.
1. Un oggetto passa allo stato del ciclo di vita In esame.
2. Quando un oggetto si trova nello stato del ciclo di vita In esame, un task "Review Object" viene creato e assegnato a un utente designato.
3. Se l'utente completa l'attività con il voto "Needs Work", l'oggetto passa allo stato del ciclo di vita In corso.
a. Quando l'oggetto si trova nello stato del ciclo di vita In corso, un task "Revisione oggetto" viene creato e assegnato al proprietario dell'oggetto.
b. Quando il proprietario dell'oggetto completa il task "Revisione oggetto", l'oggetto torna allo stato del ciclo di vita In esame.
4. All'esaminatore viene assegnato un nuovo task "Review Object" da completare.
Poiché non è noto per quante volte l'esaminatore potrebbe scegliere l'opzione "Needs Work", tentare di configurare manualmente il processo è troppo complesso.
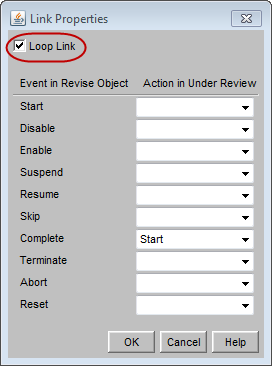
È nettamente preferibile impostare una sezione del workflow in modo che venga rieseguita. A tale scopo, si seleziona Loop link nelle proprietà del link.
Di conseguenza, ogni volta che viene completato il task "Revisione oggetto", l'oggetto torna allo stato del ciclo di vita "In esame" e viene assegnato un nuovo task all'esaminatore. I loop link vengono visualizzati in rosso.
Di seguito sono riportate alcune note aggiuntive sui loop link.
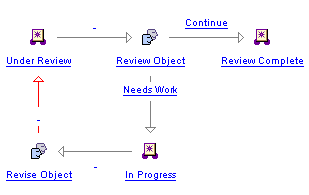
• I loop link richiedono un loop chiuso. Il loop link nel workflow riportato di seguito è insignificante.
Il loop link deve appartenere a un loop chiuso per influire sul workflow.
• I loop link reimpostano tutti i connettori immediatamente al di fuori del loop.
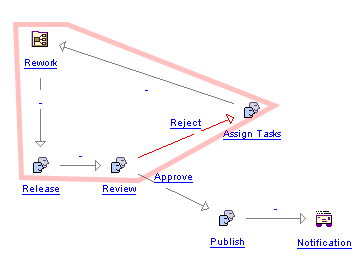
Ad esempio, si dispone del workflow indicato di seguito.
Il task Approvazione viene avviato quando tutte e tre le attività di riesame sono state completate con il voto "Approva".
Il loop link viene avviato quando Riesame 1, Riesame 2 o Riesame 3 è stato completato con il voto "Rifiuta". Il loop link è costituito dai nodi indicati di seguito.
In esame
Riesame_1
Riesame_2
Riesame_3
Connettore OR
Tuttavia, il loop reimposta anche tutti i connettori immediatamente adiacenti. In questo esempio, ciò include anche il connettore AND.
Pertanto, si consideri lo scenario seguente.
1. Il robot In esame si attiva, avviando i task Riesame_1, Riesame_2 e Riesame_3.
2. Riesame_1 viene completato con "Approva".
3. Riesame_2 viene completato con "Approva".
In questa fase, il connettore AND è ancora in attesa del voto "Approva" per Riesame_3, prima di attivare il task Approvazione.
4. Riesame_3 viene completato con "Rifiuta", con il conseguente avvio del loop link.
5. Il robot In esame si attiva nuovamente , riavviando Riesame_1, Riesame_2 e Riesame_3.
6. Riesame_3 viene completato con "Approva".
Tuttavia, anche se tutti e tre i riesami sono stati completati con il voto "Approva", il task Approvazione non viene attivato.
Il motivo è che quando il loop link è stato avviato, è stato reimpostato anche il connettore AND. Ciò ha comportato l'annullamento dei precedenti voti "Approva" da parte di Riesame_1 e Riesame_2. Ora il workflow è nuovamente in attesa del completamento di Riesame_1 e Riesame_2.
• Solo i connettori immediatamente adiacenti al loop link sono interessati, anche se il loop link può influire sul loro comportamento.
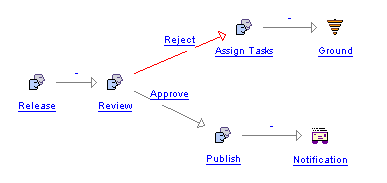
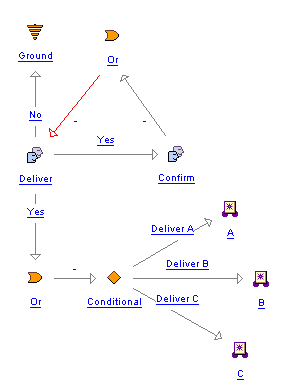
Ad esempio, si dispone del workflow indicato di seguito.
Il task Consegna è personalizzato in modo da poter votare "Sì" o "No". Se si seleziona "Sì", è possibile scegliere una delle seguenti opzioni: "Consegna A", "Consegna B" e "Consegna C".
Se si completa il task Consegna con "Sì" si verifica quanto indicato di seguito.
◦ Il workflow verifica se è stata selezionata una qualsiasi delle opzioni di consegna. In caso affermativo, passa al connettore condizionale, che attiva il task Consegna A, Consegna B o Consegna C a seconda delle opzioni selezionate.
◦ Il workflow avvia il task Conferma. Al termine del task Conferma, un loop link reimposta il task Consegna ed eventuali connettori adiacenti.
Tuttavia, non influisce sui connettori non adiacenti, anche se sono interessati in modo critico. Si consideri lo scenario riportato di seguito.
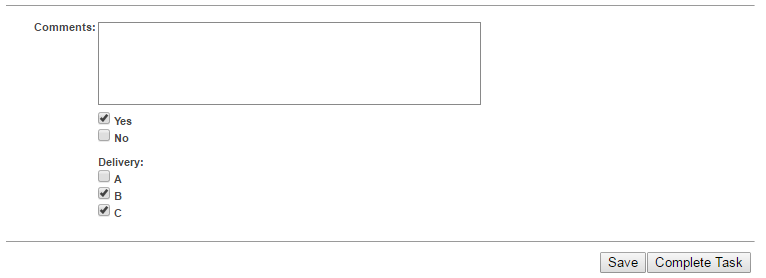
1. Il task Consegna viene completato con il voto "Sì" e viene selezionata l'opzione "Consegna B".
▪ Viene avviato il task Conferma.
▪ L'opzione "Consegna B" avvia il robot task B.
2. Il task Conferma viene completato, con la conseguente attivazione del loop link.
3. Il task Consegna viene re-inizializzato.
4. Il task Consegna viene completato con il voto "Sì" e vengono selezionate "Consegna A", "Consegna B" e "Consegna C".
I robot task Consegna A e Consegna C non vengono mai attivati. Viene attivato solo il robot Consegna B. Il motivo è che il connettore condizionale non è stato reimpostato come parte del loop link, ma solo il connettore OR adiacente.