캠-종동체 연결의 서피스 정보
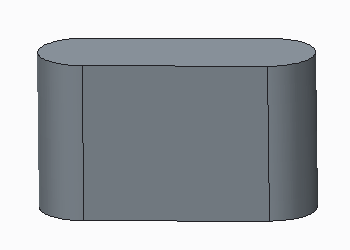
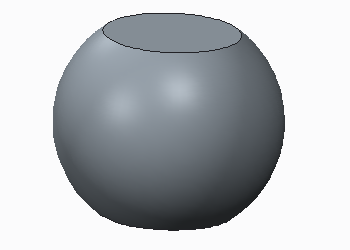
단일 바디에 속하는 연속된 밀어내기 서피스의 집합을 얼마든지 선택할 수 있습니다. 밀어낸 서피스는 커브가 있는 평면에 수직이어야 합니다. 서피스는 한 방향으로만 휠 수 있으며, 아래로는 휠 수 없습니다.
예:
|
적용 가능 서피스
|
적용 불가능 서피스
|
한 방향으로 서피스 커브 |
휘어진 서피스 |
서피스를 선택할 때는 다음 사항에 유의하십시오.
• 내부 구멍, 밀어내기 깊이 변동 등을 비롯하여 임의의 트림을 갖는 서피스를 선택할 수 있습니다.
• 밀어내기 깊이가 제각기 다른 여러 개의 서피스를 선택할 수 있습니다.
• 곡면 서피스를 선택하기 전에 자동선택(Autoselect) 확인란을 선택하면 선택된 서피스에 인접한 모든 서피스가 포함됩니다. 서피스들이 서로 연속하지 않을 수도 있으므로 형상을 부드럽게 만드는 작업이 필요한지 여부를 확인합니다. 커브나 플랫 서피스에서는 자동선택(Autoselect) 옵션을 사용할 수 없습니다.
• 캠 바디에 예리하거나 연속되지 않는 서피스 변환이 있는 경우 성능이 저하되는 것을 방지하려면 캠-종동체 연결을 생성하기 전에 형상을 수정합니다. 예를 들어, 예리한 코너에 작은 라운드 피쳐를 생성할 수 있습니다.
• 두 번째 캠과 상호 작용하는 캠의 측면은 캠 수직 방향으로 표시됩니다. 열린 커브나 서피스를 선택할 경우, 캠 수직을 가리키는 자홍색 화살표(상호 작용하는 측면에서 연장됨)가 나타납니다. 캠의 뒷면으로 캠 상호 작용을 변경하려면 캠-종동체 정의(Cam-Follower Definition) 대화상자에서 대칭 이동(Flip)을 클릭합니다. 캠 상호 작용에 대한 변경은 모델의 형상 및 어셈블리 구속을 만족하는 범위 내에서 수행해야 한다는 점에 유의하십시오.
• 평면 서피스를 선택할 수는 있지만, 플랫 서피스인 경우 캠 돌출 방향에 대한 참조도 추가로 지정해야 합니다. 캠 방향을 명시적으로 지정하려면 캠-종동체 연결 정의(Cam-Follower Connection Definition) 대화상자에서 프론트 참조(Front reference)와 백 참조(Back reference)를 클릭합니다.
• 기존 캠의 캠 서피스 정의를 변경하려면 메커니즘 트리에서 캠을 선택하고 마우스 오른쪽 버튼을 클릭한 다음 단축 메뉴에서 정의 편집(Edit Definition)을 선택합니다. 캠-종동체 연결 정의(Cam-Follower Connection Definition) 대화상자가 열립니다. Ctrl 키를 누른 상태로 선택하여 캠에서 제거할 서피스나 커브를 선택하거나 서피스 수직을 대칭 이동(Flip)할 수 있습니다.