3D 접촉 정보
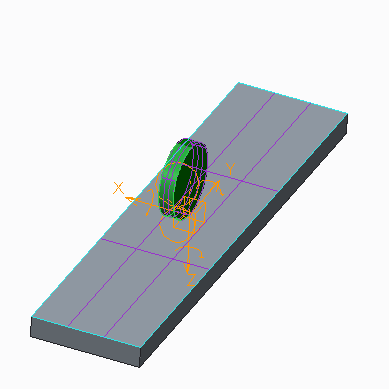
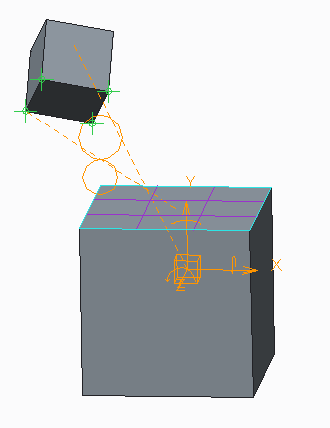
서로 다른 바디에 있는 두 부품 간의 연결을 3D 접촉이라고 합니다. 이때 접촉은 첫 번째 바디의 단일 서피스 또는 정점과 두 번째 바디의 구형, 원통 또는 평면 서피스 또는 정점 간에 이루어집니다. 아래에 표시된 것과 같이 구-구, 구-평면(또는 평면-구), 원통-원통(또는 평면-원통) 또는 원통-평면 쌍 간의 3D 접촉을 정의할 수 있습니다. 그러나 평면-평면 또는 구-원통 쌍 간의 3D 접촉은 정의할 수 없습니다.
정점을 3D 접촉 서피스로 선택하면 정점을 중심으로 구가 표시됩니다. 정점은 마치 구인 것처럼 처리됩니다.
3D 접촉은 진정한 연결은 아니지만 다른 연결 유형과 비슷한 여러 특성을 공유합니다. 3D 접촉은 연결 아래의 모델 트리에서 볼 수 있고 측정, 스냅샷 및 분석 구속을 정의할 때 연결로 사용할 수 있습니다.
3D 접촉 측정을 사용하여 압력 각도, 접촉 영역 및 슬립 속도 특성을 정의할 수 있습니다. 운동학적 드래그 도중 3D 접촉 부품 사이에 충돌 탐지가 활성화됩니다. 3D 접촉은 어셈블리 모델 트리에서 피쳐로 볼 수 있습니다.
마우스 오른쪽 버튼을 클릭하고

을 선택하여 어셈블리에서 3D 접촉을 편집합니다.