Allgemeine Einführung: Vordefinierte Randbedingungssätze
Vordefinierte Randbedingungssätze definieren die Bewegung einer Komponente in einer Baugruppe. Ein vordefinierter Randbedingungssatz enthält Bedingungen, die einen Verbindungstyp definieren (mit oder ohne Bewegungsachse). Verbindungen definieren einen bestimmten Bewegungstyp. Nachdem Sie festgestellt haben, welche Verbindung die gewünschte Bewegung erlaubt, wählen Sie die Verbindung aus der Liste. Die entsprechenden Randbedingungen werden angezeigt. Diese Randbedingungen können nicht gelöscht, geändert oder entfernt werden. Neue Randbedingungen lassen sich nicht hinzufügen, Eine Komponente, die mit vordefinierten Randbedingungssätzen platziert wird, wird im Modellbaum mit einem eindeutigen Symbol (

) gekennzeichnet.
Die vordefinierten Sätze Starr (Rigid), Schweißnaht (Weld), Benutzerdefiniert (User-Defined), Kugel (Ball) und Gimbal verfügen nicht über Bewegungsachsen. Die Randbedingungssätze Kugel (Ball) und Gimbal weisen Bewegung, jedoch keine Achse auf.
Alle vordefinierten Randbedingungssätze können in Mechanism Design bearbeitet werden. Weitere Informationen finden Sie im Hilfe-Center.
Wählen Sie im Navigations- und Sammelbereich eine Bewegungsachse. Der Bereich "Eigenschaften der Bewegungseinstellungen" wird angezeigt, in dem Sie die Eigenschaften der Bewegungsachse festlegen können.
Satztypen
Mit vordefinierten Randbedingungssätzen definierte Komponenten sind absichtlich unterbestimmt, damit sie einen oder mehrere Freiheitsgrade behalten. Ziehen Sie die Komponente nach dem Konfigurieren eines vordefinierten Randbedingungssatzes, um sicherzustellen, dass sie korrekt platziert ist und die gewünschte Bewegung zulässt.
• Starr (Rigid) – Verbindet zwei Komponenten so, dass diese sich nicht relativ zueinander bewegen. Sie werden durch einen beliebigen gültigen Satz mit Randbedingungen definiert. Auf diese Weise verbundene Komponenten werden zu einem einzelnen Körper. Starre Verbindungssatz-Randbedingungen sind einem benutzerdefinierten Randbedingungssatz ähnlich.
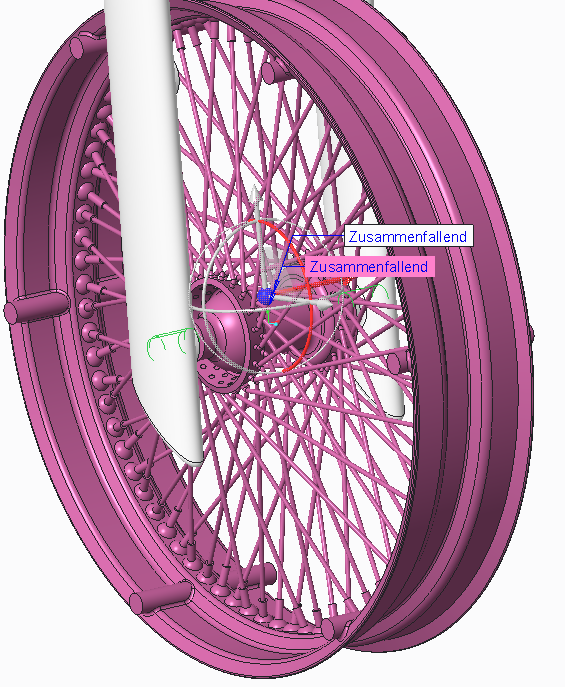
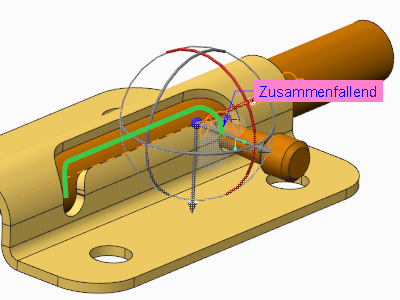
• Drehgelenk (Pin) – Verbindet eine Komponente mit einer referenzierten Achse, so dass sich die Komponente mit 1 Freiheitsgrad entlang der Achse dreht oder bewegt. Wählen Sie als Achsenreferenz eine Achse, Kante, Kurve oder Fläche. Wählen Sie als Verschiebungsreferenz einen Bezugspunkt, Eckpunkt oder eine Fläche aus. Der Verbindungssatz Drehgelenk (Pin) verfügt über zwei Randbedingungen: Achsenausrichtung und Zusammenfallend.
• Schieber (Slider) – Verbindet eine Komponente mit einer referenzierten Achse, so dass sich die Komponente mit 1 Freiheitsgrad entlang der Achse bewegt. Wählen Sie Kanten oder Ausrichtungsachsen als Ausrichtungsreferenzen. Wählen Sie Flächen als Rotationsreferenzen. Der Verbindungssatz Schieber (Slider) verfügt über zwei Randbedingungen: Achsenausrichtung und Zusammenfallend, sodass die Rotation um die Achse eingeschränkt wird.
• Zylinder (Cylinder) – Verbindet eine Komponente so, dass sie sich mit 2 Freiheitsgraden entlang einer bestimmten Achse bewegt und dreht. Wählen Sie Achsen, Kanten und Kurven als Ausrichtungsreferenzen. Ein Zylinder-Verbindungssatz hat eine Randbedingung.
• Planar – Komponenten werden so verbunden, dass sie sich in einer Ebene relativ zueinander mit 2 Freiheitsgraden und um eine im rechten Winkel zur Ebene stehende Achse mit 1 Freiheitsgrad bewegen (Pfeile in der Abbildung unten). Wählen Sie Flächenreferenzen für die Randbedingung "Zusammenfallend (Coincident)" aus. Ein Planar-Verbindungssatz hat nur eine Planargegenrichtungs- oder Planarausrichtungs-Randbedingung. Die Gegenrichtungs- oder Ausrichtungsbedingung kann Umgekehrt oder Versatz sein.
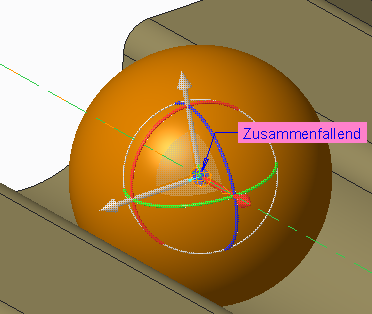
• Kugel (Ball) – Verbindet eine Komponente so, dass sie in jeder Richtung mit 3 Freiheitsgraden rotieren kann (360°) Wählen Sie Punkte, Eckpunkt oder Kurvenenden für Ausrichtungsreferenzen aus. Der Verbindungssatz Kugel (Ball) weist die Punkt-zu-Punkt-Randbedingung "Zusammenfallend (Coincident)" auf.
• Schweißnaht (Weld) – Verbindet eine Komponente so mit einer anderen, dass sie sich nicht relativ zueinander bewegen. Die Komponente wird in der Baugruppe platziert, indem das Koordinatensystem der Komponente mit einem Koordinatensystem in der Baugruppe ausgerichtet wird. Die Komponente kann mit Hilfe der offenen Freiheitsgrade in der Baugruppe angepasst werden. Die Verbindung Schweißnaht (Weld) weist die Randbedingung "Zusammenfallend (Coincident)" für die Koordinatensystemausrichtung auf.
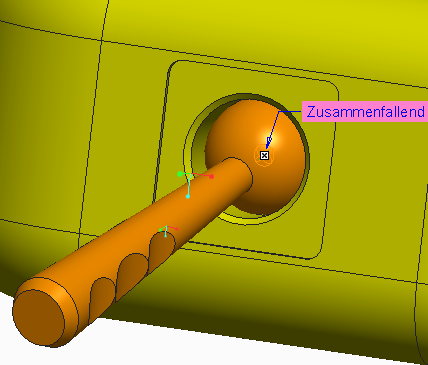
• Lager (Bearing) – Eine Kombination von Kugelgelenk- und Schieber-Verbindungen mit 4 Freiheitsgraden. Es gibt drei Freiheitsgrade (für 360°-Drehung) und Bewegung entlang einer referenzierten Achse. Wählen Sie für die erste Referenz einen Punkt auf der Komponente oder der Baugruppe. Wählen Sie für die zweite Referenz eine Kante, Achse oder Kurve auf der Baugruppe oder der Komponente. Die Punktreferenz kann frei um die Kante rotieren und sich entlang ihrer Länge bewegen. Die Verbindung Lager (Bearing) weist die Punkt-zu-Kanten-Randbedingung "Zusammenfallend (Coincident)" auf.
• Allgemein (General) – Hat 1 oder 2 konfigurierbare Randbedingungen, die mit denen in einem benutzerdefinierten Satz identisch sind. Tangente, Punkt auf Kurve und Punkt auf unebener Fläche können bei einer Allgemein-Verbindung nicht verwendet werden.
• 6 FG (6DOF) – Beeinflusst nicht die Bewegung der Komponente in Bezug auf die Baugruppe, da keine Randbedingungen angewendet werden. Das Koordinatensystem der Komponente wird mit dem Koordinatensystem in der Baugruppe ausgerichtet. Die x-, y- und z-Baugruppenachsen sind Bewegungsachsen, die Rotation und Verschiebung ermöglichen.
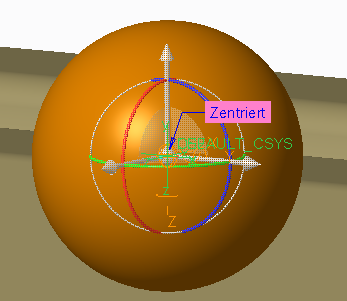
• Gimbal – Ein Schwenkgelenk mit der Randbedingung "Zentriert (Centered)". Die Koordinatensystemmittelpunkte sind ausgerichtet, jedoch nicht die Achsen, um freie Rotation zu ermöglichen.
• Führung (Slot) – Ein Punkt auf einer ungeraden Leitkurve. Diese Verbindung verfügt über 4 Freiheitsgrade, wobei der Punkt der Leitkurve in drei Richtungen folgt. Wählen Sie für die erste Referenz einen Punkt auf der Komponente oder der Baugruppe. Der Referenzpunkt folgt der ungeraden Referenz-Leitkurve. Die Endpunkte der Leitkurve werden beim Konfigurieren der Verbindung festgelegt. Eine Führungs-Verbindung hat als Randbedingung eine Punktausrichtung zu mehreren Kanten oder Kurven.