리소스 카탈로그를 사용하여 물리적 인스턴스 작성
지금까지 MRB에서 사양 플랜트와 제조 플랜트 설정을 작성했습니다. 그런 다음,
MRB에서 리소스 카탈로그 작성 절차에서 정의한 산업용 로봇 시스템 사양을 로컬 플랜트 설정에 추가합니다. 워크스테이션 아래의 산업용 로봇, 즉 이 케이스에서
Workstation 1은
Specification_Plant_Sweden 아래에 작성된 사양과 일치해야 합니다. 시스템 사양을 추가하려면 다음을 수행하십시오.
1. Manufacturing_Plant_India 정보 페이지에서 트리 선택 열기를 클릭합니다.
2. 트리 선택 검색 창에서 Specification_Plant_Sweden 플랜트를 검색하고 로드합니다.
Workstation 1에서 스웨덴 본사에서 요구하는 사양을 따르는 시스템을 사용합니다. Specification_Plant_Sweden 아래에 산업용 로봇 사양 3개가 지정되었습니다. 이 경우에는 Delta Robot을 사용합니다.
3. 트리 선택 창에서 Delta Robot을 선택하고 마우스 오른쪽 버튼을 클릭한 다음 복사를 선택하여 사양을 복사합니다.
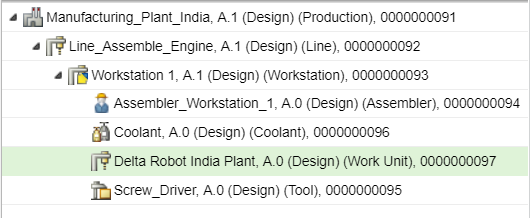
4. 플랜트 구조에서 Workstation 1을 마우스 오른쪽 버튼으로 클릭하고 리소스 인스턴스로 붙여넣기를 선택합니다. 리소스 인스턴스로 붙여넣기 작업을 수행하면 다음 이미지에 강조 표시된 새 인스턴스가 생성됩니다.
이 작업을 수행하면 워크스테이션 아래에서 Specification_Plant_Sweden의 Delta Robot에 대한 시스템 속성과 동일한 속성을 사용하는 시스템이 작성됩니다. 인도와 브라질에 사용되는 시스템이나 로봇 제조업체는 서로 다를 수 있으므로 인스턴스 이름을 바꿔야 할 수 있습니다.
이 경우 인스턴스 이름이 Delta Robot India Plant로 바뀝니다.
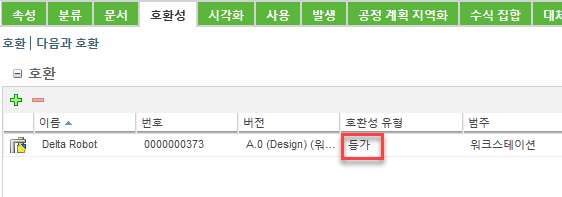
| MRB의 호환성 탭을 사용하여 두 인스턴스의 호환성 유형을 볼 수 있습니다. 스웨덴 사양과 인스턴스 간의 호환성은 등가가 되어야 합니다. 이러한 플랜트를 여러 개 생성하고 이러한 플랜트에 여러 인스턴스를 복사할 수 있습니다. |
5. Manufacturing_Plant_India 및 그 아래의 엔티티를 체크 인합니다.
위 이미지에서 왼쪽은 설계입니다. 오른쪽에는 개별 인스턴스의 설계가 사용됩니다.