リソースカタログを使用した物理インスタンスの作成
これまでに、MRB で仕様プラントと製造プラント設定を作成しました。次に、
MRB でのリソースカタログの作成手順で定義した工業ロボットマシン仕様をローカルプラント設定に追加します。ワークステーション (この場合は
Workstation 1) の下の工業ロボットは、
Specification_Plant_Sweden で作成されている仕様に一致している必要があります。マシン仕様を追加するには、次の手順を実行します。
1. Manufacturing_Plant_India 情報ページで、「ツリーピッカーを開く」をクリックします。
2. 「ツリーピッカーサーチ」ウィンドウで、Specification_Plant_Sweden プラントをサーチしてロードします。
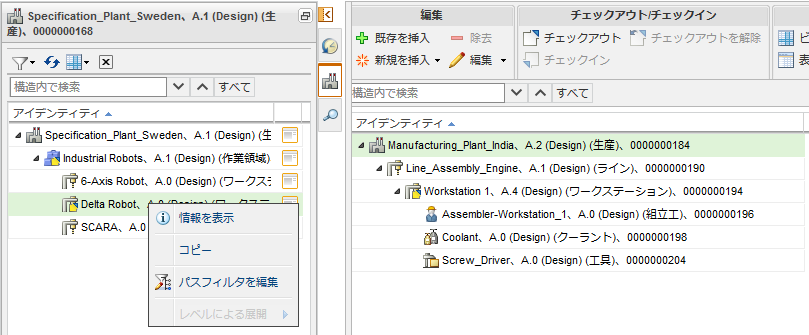
Workstation 1 で、スウェーデンのオフィスが求める仕様に従ったマシンを使用します。Specification_Plant_Sweden で、3 つの工業ロボット仕様を指定しています。ここでは、Delta Robot を使用します。
3. 「ツリーピッカー」ウィンドウで、Delta Robot を選択し、右クリックして「コピー」を選択し、仕様をコピーします。
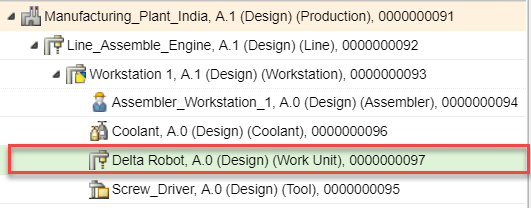
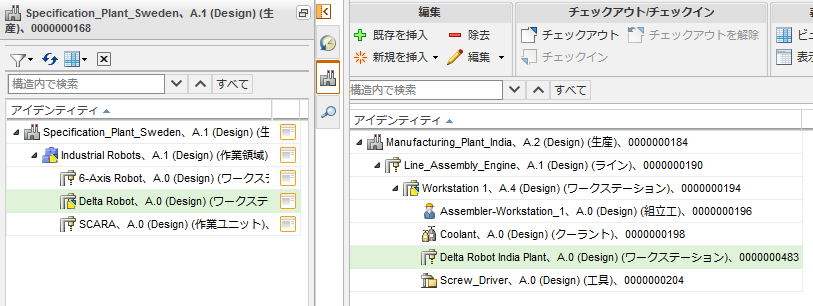
4. プラント構造で、Workstation 1 を右クリックし、「リソースインスタンスとして貼り付け」を選択します。 「リソースインスタンスとして貼り付け」操作では、次の図のハイライトで示すように、新しいインスタンスが作成されます。
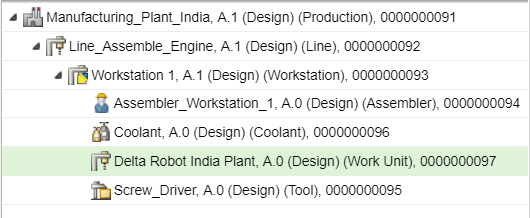
この操作により、Specification_Plant_Sweden の Delta Robot のマシン属性と同じ属性を使用するマシンがワークステーションの下に作成されます。インドおよびブラジルで使用されるマシンまたはロボットの製造メーカーは異なる場合があるため、インスタンスの名前は変更してもかまいません。
ここでは、インスタンスの名前を Delta Robot India Plant に変更します。
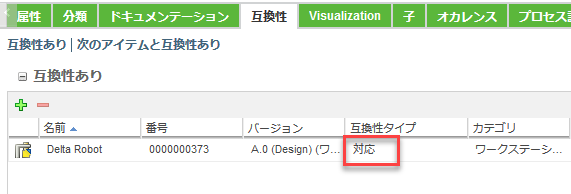
| MRB の「互換性」タブを使用して、2 つのインスタンスの「互換性」タイプを表示できます。スウェーデン仕様とインスタンス間の互換性は「対応」でなければなりません。 そのようなプラントを複数作成し、複数のインスタンスをこれらのプラントにコピーできます。 |
5. Manufacturing_Plant_India とその下のエンティティをチェックインします。
上の図では左側が設計です。右側でその設計を個々のインスタンスに使用します。