Vínculos de acciones de proceso
Los vínculos de acciones conectan nodos de actividades en una secuencia: 
En su forma más simple, los vínculos simplemente indican al proceso de trabajo qué debe hacer después de un evento. Cuando una actividad tiene más de un resultado posible, se utilizan vínculos para configurar qué debe suceder después en función de cómo se completa la actividad.
Con la excepción del nodo Inicio, todos los nodos deben tener un vínculo de entrada que se debe incluir en el flujo de trabajo.
Una vez añadido un nodo, se debe vincular a otro nodo:
1. Seleccione la herramienta de vinculación .
.No se pueden añadir vínculos mientras un nodo esté seleccionado. Si tiene problemas para añadir un vínculo, asegúrese de que no haya nodos seleccionados. Los nodos seleccionados tienen un borde negro:  |
2. Pulse en el primer nodo y arrastre el cursor hacia el segundo nodo.
3. Suelte el botón del ratón cuando el cursor alcance el segundo nodo.
Consulte los siguientes ejemplos:
Vínculos básicos | Vínculos de acciones de proceso al utilizar los estados de acción de proceso por defecto. |
Vínculos de eventos de distribución | Vínculos de acciones de proceso para las actividades en las que se incluyen eventos de distribución personalizados. |
Vínculos de bucle | Configuración de la opción Vínculo de bucle en las propiedades de vínculo. |
Vínculos básicos
El vínculo más básico es aquel que simplemente indica que cuando un evento ha finalizado, el siguiente puede comenzar. También se pueden crear vínculos para otras acciones de proceso de trabajo. Por ejemplo, se puede especificar que un evento se debe abortar si se suspendiera una actividad específica.
Tenga en cuenta el siguiente ejemplo:
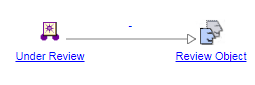
1. Se crean los siguientes nodos:
◦ "Revisión en curso": un robot de métodos define automáticamente el estado del objeto en Revisión en curso. No se requiere ninguna interacción del usuario.
◦ "Review Object": esta es una tarea asignada a un usuario para revisar el objeto.

2. Se crea un vínculo básico entre los dos nodos:
3. Pulse dos veces en el vínculo para abrir la ventana Propiedades del vínculo:
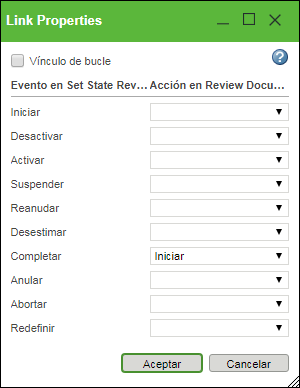
Esto significa que tan pronto como el robot de métodos complete la tarea (colocando el objeto en el estado de Revisión en curso), se crea una nueva tarea para "Review Object" y se asigna automáticamente al usuario.
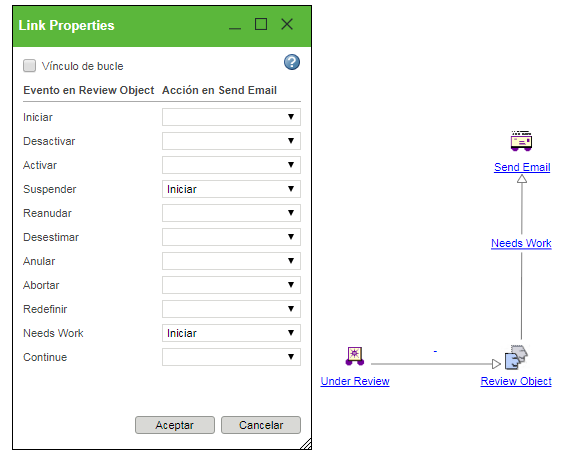
4. Se pueden utilizar las opciones adicionales de la ventana Propiedades del vínculo para un proceso de trabajo más complejo, que normalmente implica conexiones de distribución o acciones de administración de procesos de trabajo.
Por ejemplo, un usuario con permisos adecuados puede utilizar las acciones del Administrador de procesos de trabajo para suspender un nodo. A continuación, se pueden utilizar eventos de vínculo para asegurarse de que se envía un correo electrónico al jefe de proyecto si se suspende la actividad:
Vínculos de eventos de distribución
Las actividades tienen normalmente eventos de distribución. Para obtener más información, consulte la ficha Distribución.
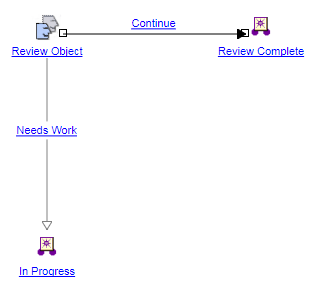
Por ejemplo, el usuario decide dar al usuario "Review Object" dos opciones al completar la tarea: "Needs Work" y "Continue".
Cuando se configuran vínculos de salida de la actividad, la opción Completa ya no está disponible. En su lugar, aparecen los eventos de distribución:
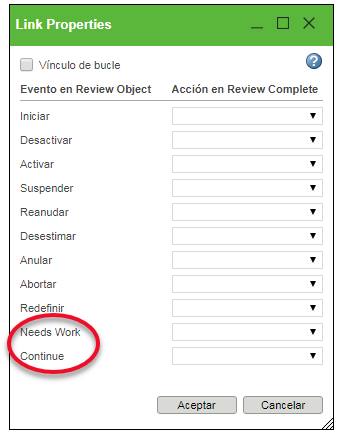
Se debe configurar un vínculo saliente para cada evento de distribución personalizado. Por ejemplo, se puede especificar que si el usuario selecciona "Needs Work", el objeto pase al estado In Progress. Si el usuario selecciona "Continue", el objeto pasa al estado Review Object:
Vínculos de bucle
Se puede utilizar un vínculo de bucle para las secciones del proceso de trabajo que quizás tengan que visitarse más de una vez. Un vínculo de bucle redefine todos los nodos de su ruta, lo que permite ejecutar los nodos más de una vez.
Por ejemplo, en el proceso de trabajo se incluyen la siguiente serie de eventos:
1. Un objeto pasa al estado Revisión en curso.
2. Cuando un objeto se encuentra en el estado Review Object, se crea una tarea "Review Object" y esta se asigna a un usuario designado.
3. Si el usuario completa la actividad con un voto "Needs Work", el objeto pasa al estado In Progress.
a. Si el objeto está en el estado In Progress, se crea una tarea "Revise Object" y esta se asigna al propietario del objeto.
b. Cuando el propietario del objeto completa la tarea "Revise Object", esta vuelve al estado Revisión en curso.
4. Al revisor se asigna una nueva tarea "Review Object" que deberá completar.
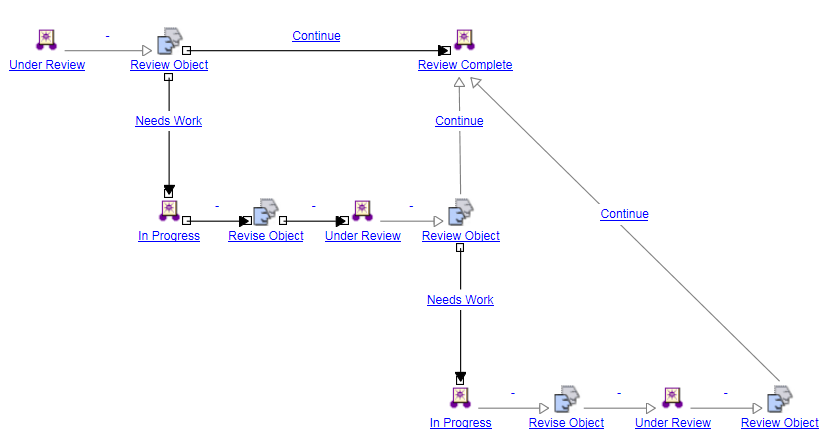
No se sabe cuántas veces el revisor puede elegir la opción "Needs Work", e intentar configurar manualmente el proceso es muy complejo:
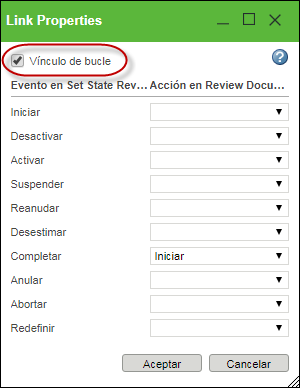
Una opción mucho mejor es indicar a una sección del proceso de trabajo que comience de nuevo. Para ello, se debe seleccionar Vínculo de bucle en las propiedades del vínculo:
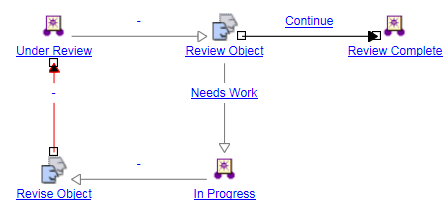
Como resultado, siempre que se complete la tarea "Revise Object", el objeto vuelve al estado Revisión en curso y se asigna una nueva tarea al revisor. Los vínculos de bucle aparecen en rojo:
Algunas notas adicionales sobre los vínculos de bucle:
• Los vínculos de bucle requieren un bucle cerrado. El vínculo de bucle del flujo de trabajo siguiente no tiene sentido:
El vínculo de bucle debe formar parte de un bucle cerrado para influir en el flujo de trabajo:
• Los vínculos de bucle redefinen cualquier conector inmediatamente fuera del bucle.
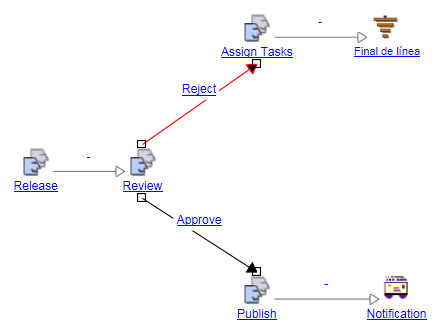
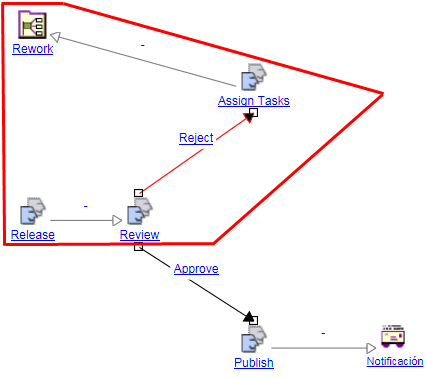
Por ejemplo, si se tiene el flujo de trabajo siguiente:
La tarea de aprobación se inicia si las tres actividades de revisión se completan con un voto "Aprobar".
El vínculo de bucle se inicia si Revisión 1, Revisión 2 o Revisión 3 se completan con un voto "Rechazar". El vínculo de bucle consta de los siguientes nodos:
Revisión en curso
Revisión_1
Revisión_2
Revisión_3
Conector O
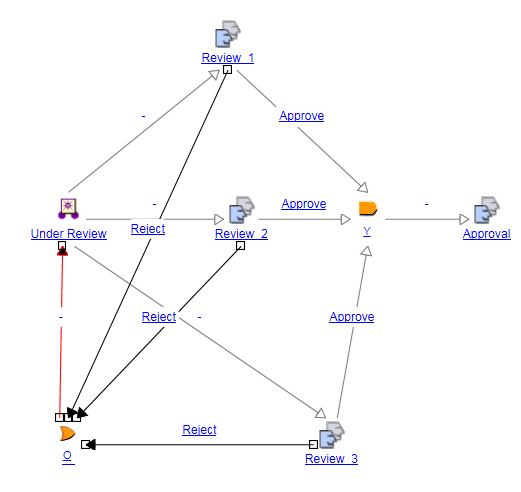
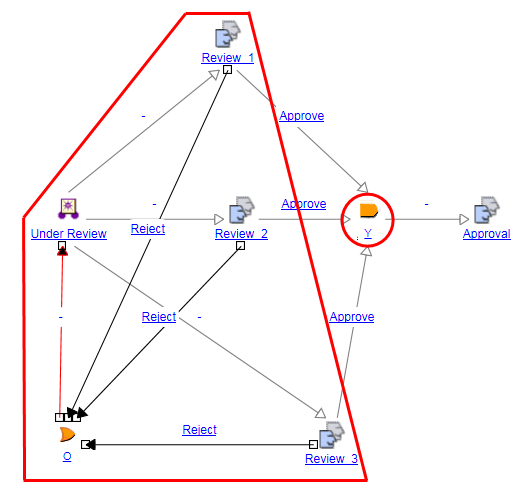
Sin embargo, el bucle también redefine cualquier conector inmediatamente adyacente. En este ejemplo, que incluye el conector Y:
Por lo tanto, considere el escenario siguiente:
1. Se activa el robot de Revisión en curso, que inicia las tareas Revisión_1, Revisión_2 y Revisión_3.
2. Revisión_1 se completa con "Aprobar".
3. Revisión_2 se completa con "Aprobar".
En este punto, el conector Y todavía espera a que Revisión_3 vote "Aprobar" antes de activar la tarea de aprobación.
4. Revisión_3 se completa con "Rechazar", lo que inicia el vínculo de bucle.
5. El robot de Revisión en curso se activa de nuevo, y se reinician Revisión_1, Revisión_2 y Revisión_3.
6. Revisión_3 se completa con "Aprobar".
Sin embargo, aunque las tres revisiones se han completado con un voto "Aprobar", la tarea de aprobación no se activa.
El motivo es que, al iniciar el vínculo de bucle, el conector Y también se ha redefinido. Esto ha anulado efectivamente los anteriores votos "Aprobar" de Revisión_1 y Revisión_2. Ahora el flujo de trabajo espera que el voto de Revisión_1 y Revisión_2 se complete de nuevo.
• Solo afecta a los conectores inmediatamente adyacentes al vínculo de bucle, aunque su comportamiento se pueda ver afectado por el vínculo de bucle.
Por ejemplo, si se tiene el flujo de trabajo siguiente:
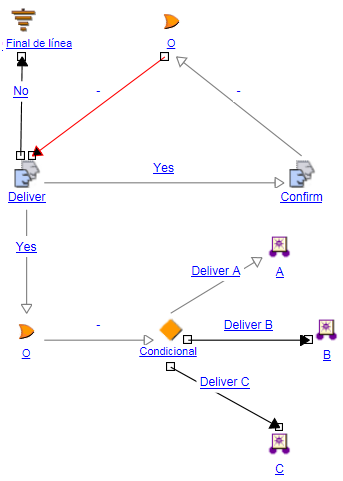
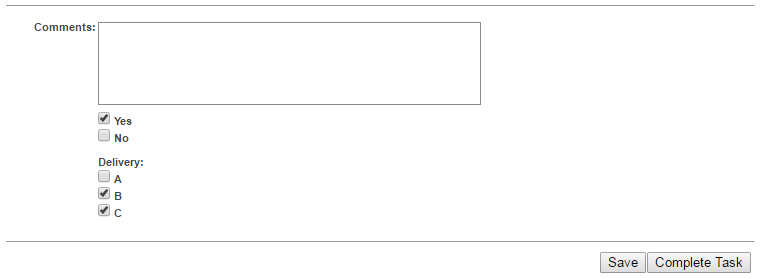
Se personaliza la tarea de envío para poder votar "Sí" o "No" Si se selecciona "Sí", se puede elegir cualquiera de las opciones siguientes: "Envío A", "Envío B" y "Envío C".
Si se completa la tarea de envío con "Sí":
◦ El flujo de trabajo verifica si se ha seleccionado alguna de las opciones de envío. Si es así, continúa con el conector condicional, que activará la tarea del Envío A, Envío B o Envío C según las opciones que se hayan seleccionado.
◦ El flujo de trabajo inicia la tarea de confirmación. Al completarse la tarea de confirmación, un vínculo de bucle redefine la tarea de envío y cualquier conector adyacente:
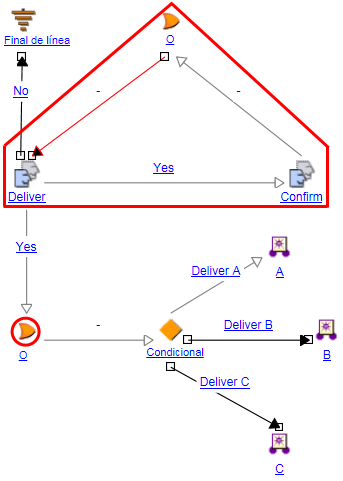
Sin embargo, no afecta a los conectores que no son adyacentes, incluso si se ven afectados críticamente. Considere el escenario siguiente:
1. Se completa la tarea de envío con un voto "Sí" y se selecciona la opción "Envío B":
▪ Se inicia la tarea de confirmación.
▪ La opción "Envío B" inicia el robot de la tarea B.
2. La tarea de confirmación se completa y activa el vínculo de bucle.
3. La tarea de envío se reinicializa.
4. Se completa la tarea de envío con un voto "Sí" y se selecciona "Envío A", "Envío B" y "Envío C".
Los robots de las tareas de Envío A y Envío C no se activan nunca. Solo se activa el robot del Envío B. El motivo es que el conector condicional no se ha redefinido como parte del vínculo de bucle, solo el conector O adyacente.