프로세스 작업 링크
작업 링크는 활동 노드를 시퀀스로 함께 연결합니다. 
링크는 가장 간단한 형식으로 이벤트 다음에 수행되는 작업을 워크플로에 알립니다. 활동에 가능한 결과가 둘 이상이면 링크를 사용하여 활동이 완료되는 방법에 따라 다음에 발생해야 하는 작업을 구성합니다.
시작 노드를 제외한 모든 노드에는 워크플로에 포함할 수신 링크가 있어야 합니다.
노드가 추가되면 해당 노드를 다른 노드에 연결해야 합니다.
1. 연결 도구 를 선택합니다.
를 선택합니다.노드가 선택되어 있으면 링크를 추가할 수 없습니다. 링크를 추가할 수 없으면 선택된 노드가 없는지 확인하십시오. 선택된 노드에는 검은색 경계가 있습니다.  |
2. 첫 번째 노드를 클릭하고 커서를 두 번째 노드로 끕니다.
3. 커서가 두 번째 노드에 도달하면 마우스 버튼을 놓습니다.
아래의 예를 참조하십시오.
기본 링크 | 기본 프로세스 작업 상태 사용 시의 프로세스 작업 링크입니다. |
라우팅 이벤트 링크 | 사용자 정의 라우팅 이벤트를 포함하는 활동에 대한 프로세스 작업 링크입니다. |
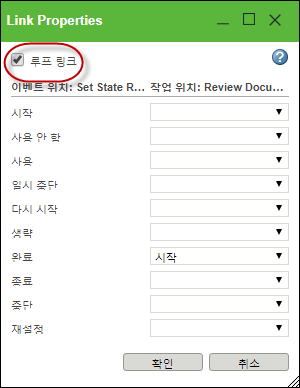
루프 링크 | 링크 등록 정보에서 루프 링크 옵션을 설정합니다. |
기본 링크
가장 기본적인 링크는 한 이벤트가 완료될 때 다음 이벤트가 시작될 수 있음을 나타내는 링크입니다. 또한 다른 워크플로 작업에 대한 링크를 작성할 수 있습니다. 예를 들어, 특정 활동이 일시 중단되는 경우 이벤트가 중단되도록 지정할 수 있습니다.
다음 예제를 참고하십시오.
1. 다음 노드를 작성합니다.
◦ "검토 중" - 메소드 로봇이 자동으로 객체 상태를 검토 중으로 설정합니다. 사용자 상호 작용이 필요하지 않습니다.
◦ "객체 검토" - 객체 검토를 위해 단일 사용자에게 지정된 임무입니다.

2. 두 노드 간의 기본 링크를 작성합니다.
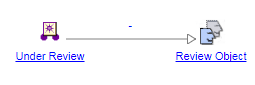
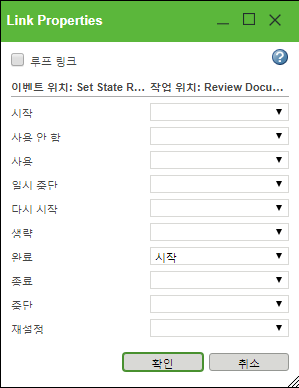
3. 링크를 두 번 클릭하여 링크 등록 정보 창을 엽니다.
즉, 메소드 로봇이 해당 임무를 완료하자마자(객체를 검토 중 상태로 지정) 새 "객체 검토" 임무가 자동으로 작성되어 사용자에게 지정됩니다.
4. 일반적으로 라우팅 연결 또는 워크플로 관리 작업을 포함하는 더 복잡한 워크플로의 경우 링크 등록 정보 창의 추가 옵션을 사용할 수 있습니다.
예를 들어, 적절한 권한을 가진 사용자는 워크플로 프로세스 매니저 작업을 사용하여 노드를 일시 중단할 수 있습니다. 그런 다음 링크 이벤트를 사용하여 활동이 일시 중단되는 경우 프로젝트 매니저에게 이메일이 전송되는지 확인할 수 있습니다.
라우팅 이벤트 링크
활동에는 일반적으로 라우팅 이벤트가 있습니다. 자세한 내용은 라우팅 탭을 참조하십시오.
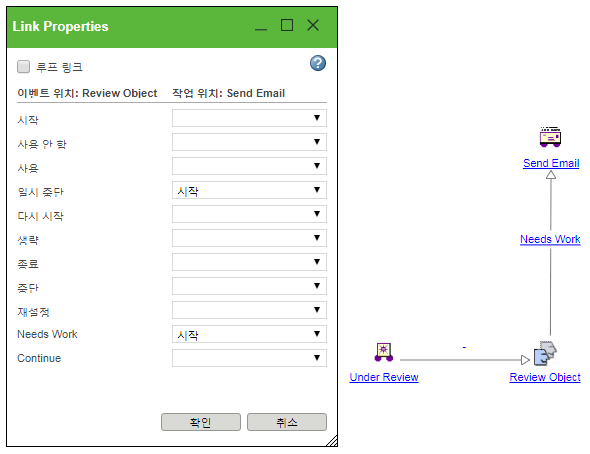
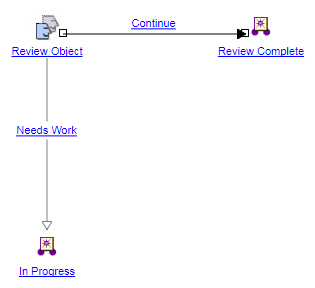
예를 들어, 임무를 완료할 때 "객체 검토" 사용자에게 두 가지 옵션인 "작업 필요" 및 "계속"을 제공하기로 결정합니다.
활동에서 아웃바운드 링크를 구성하면 완료 옵션을 더 이상 사용할 수 없습니다. 대신 라우팅 이벤트가 나타납니다.
각 사용자 정의 라우팅 이벤트에 대한 발신 링크를 구성해야 합니다. 예를 들어, 사용자가 "작업 필요"를 선택하는 경우 객체가 진행 중 상태로 이동하도록 지정할 수 있습니다. 사용자가 "계속"을 선택하는 경우 객체가 검토 완료 상태로 이동합니다.
루프 링크
두 번 이상 재방문해야 할 수도 있는 워크플로의 섹션에 대해 루프 링크를 사용할 수 있습니다. 루프 링크는 해당 경로의 모든 노드를 재설정하므로 사용자가 노드를 두 번 이상 실행할 수 있습니다.
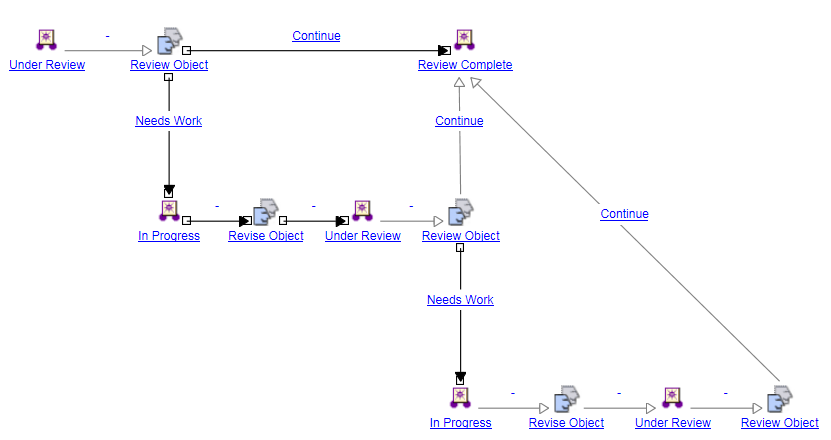
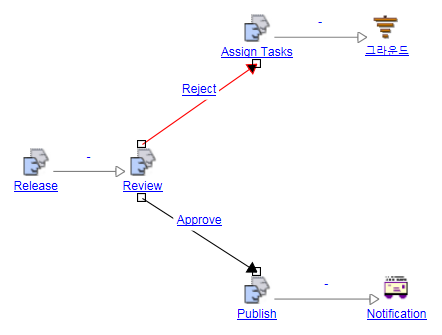
예를 들어, 워크플로에 다음과 같은 일련의 이벤트가 포함되어 있습니다.
1. 객체가 검토 중 상태로 이동합니다.
2. 객체가 검토 중 상태에 있으면 "객체 검토" 임무가 작성되어 해당 사용자에게 지정됩니다.
3. 사용자가 "작업 필요" 투표로 활동을 완료하는 경우 객체가 진행 중 상태로 이동합니다.
a. 객체가 검토 중 상태에 있으면 "객체 개정" 임무가 작성되어 객체 소유자에게 지정됩니다.
b. 객체 소유자가 "객체 개정" 임무를 완료하면 해당 작업이 검토 중 상태로 다시 이동합니다.
4. 검토자에게 완료할 새 "객체 검토" 임무가 지정됩니다.
검토자가 "작업 필요" 옵션을 몇 번이나 선택할 수 있는지 알 수 없는 상태에서 사용자가 수동으로 프로세스를 구성하려는 시도는 매우 복잡합니다.
가장 좋은 옵션은 워크플로 섹션을 다시 시작하도록 안내하는 것입니다. 이렇게 하려면 링크 등록 정보에서 루프 링크를 선택합니다.
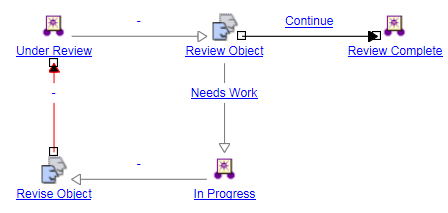
결과적으로 "객체 개정" 임무가 완료될 때마다 객체가 검토 중 상태로 다시 이동하며 새 임무가 검토자에게 지정됩니다. 루프 링크는 빨간색으로 표시됩니다.
다음은 루프 링크에 대한 몇 가지 추가적인 참고 사항입니다.
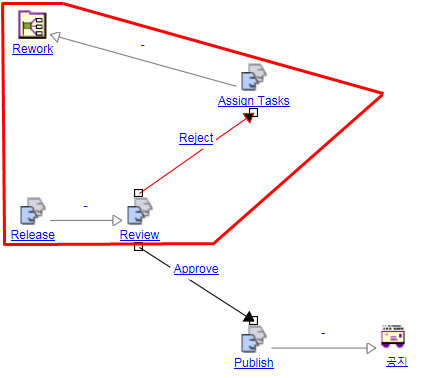
• 루프 링크에는 닫힌 루프가 필요합니다. 다음 워크플로의 루프 링크는 중요하지 않습니다.
루프 링크는 워크플로에 영향을 주기 위해 닫힌 루프의 일부여야 합니다.
• 루프 링크는 모든 커넥터를 루프 외부로 즉시 재설정합니다.
예를 들어, 다음 워크플로가 있습니다.
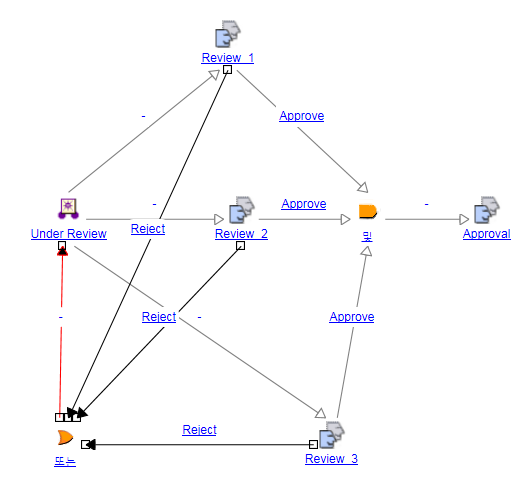
세 가지 검토 활동이 모두 "승인" 투표로 완료되면 승인 임무가 시작됩니다.
검토 1, 검토 2 또는 검토 3이 "거부" 투표로 완료되면 루프 링크가 시작됩니다. 루프 링크는 다음과 같은 노드로 구성되어 있습니다.
검토 중
Review_1
Review_2
Review_3
또는 커넥터
그러나 루프도 바로 인접한 커넥터를 재설정합니다. 이 예에서는 AND 커넥터를 포함합니다.
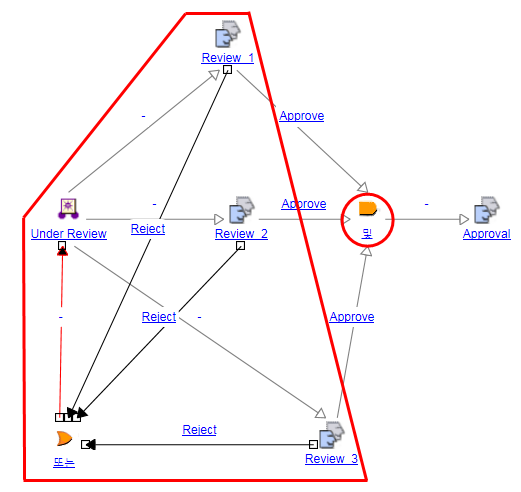
따라서 다음 시나리오를 고려하십시오.
1. 검토 중 로봇이 트리거되고 Review_1, Review_2 및 Review_3 임무가 시작됩니다.
2. Review_1은 "승인"으로 완료됩니다.
3. Review_2는 "승인"으로 완료됩니다.
이때 AND 커넥터는 승인 임무가 트리거되기 전에 Review_3이 "승인"을 투표할 때까지 계속 기다립니다.
4. Review_3은 "거부"로 완료되어 루프 링크가 시작됩니다.
5. 검토 중 로봇이 다시 트리거되고 Review_1, Review_2 및 Review_3이 다시 시작됩니다.
6. Review_3이 "승인"으로 완료됩니다.
그러나 이제 세 가지 검토가 모두 "승인" 투표로 완료된 경우에도 승인 임무가 트리거되지 않습니다.
원인은 루프 링크가 시작될 때 AND 커넥터도 다시 설정되었기 때문입니다. 이를 통해 이전 "승인" 투표가 Review_1 및 Review_2에서 효율적으로 무효화됩니다. 이제 워크플로는 Review_1 및 Review_2가 다시 완료되도록 기다립니다.
• 커넥터의 동작이 루프 링크에 의해 영향을 받는 경우에도 루프 링크에 바로 인접한 커넥터만 영향을 받습니다.
예를 들어, 다음 워크플로가 있습니다.
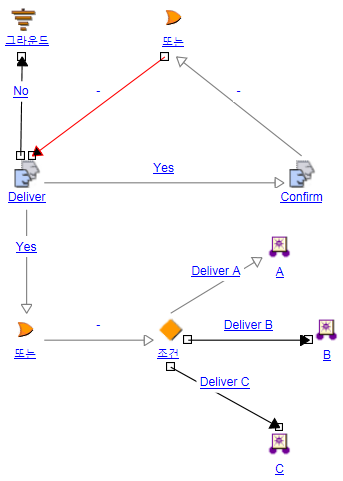
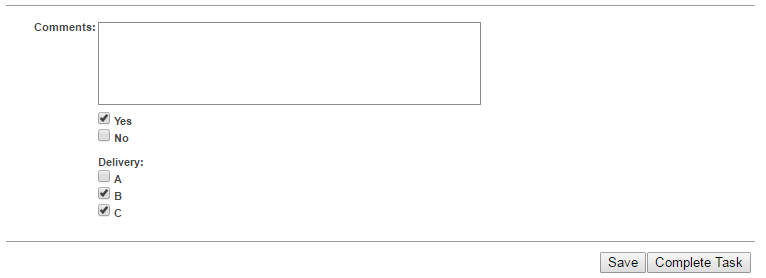
"예" 또는 "아니요"를 투표할 수 있도록 전달 임무가 사용자 정의되었습니다. "예"를 선택하면 "전달 A", "전달 B" 및 "전달 C" 옵션 중에서 선택할 수 있습니다.
전달 임무를 "예"로 완료한 경우:
◦ 워크플로는 사용자가 전달 옵션 중 하나를 선택했는지 확인합니다. 선택한 경우 조건부 커넥터로 진행되며 선택한 옵션에 따라 전달 A, 전달 B 또는 전달 C 임무를 트리거합니다.
◦ 워크플로가 확인 임무를 시작합니다. 확인 임무가 완료되면 루프 링크가 전달 임무 및 인접한 커넥터를 다시 설정합니다.
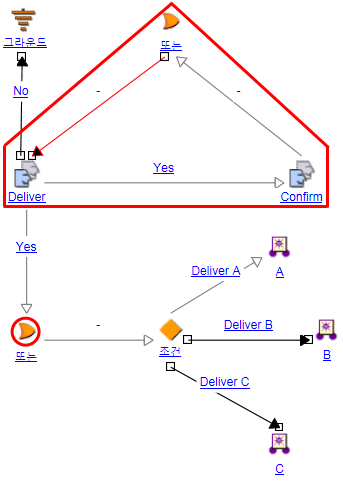
그러나 중요한 영향을 주는 경우에도 인접하지 않은 커넥터에는 영향을 주지 않습니다. 다음 시나리오를 고려하십시오.
1. 전달 임무를 "예"로 완료하고 "전달 B" 옵션을 선택했습니다.
▪ 확인 임무가 시작됩니다.
▪ "전달 B" 옵션이 B 임무 로봇을 시작합니다.
2. 확인 임무가 완료되고 루프 링크가 트리거됩니다.
3. 전달 임무가 다시 시작됩니다.
4. 전달 임무를 "예" 투표로 완료하고 "전달 A", "전달 B" 및 "전달 C"를 선택했습니다.
전달 A 및 전달 C 임무 로봇이 트리거되지 않습니다. 전달 B 로봇만 트리거됩니다. 원인은 조건부 커넥터가 루프 링크의 일부로 재설정되지 않고 인접한 OR 커넥터만 재설정되기 때문입니다.