Aufgabe 3-1: Modellieren von GDGs mit der statespace-Funktion
Lesen Sie das unten definierte Problem, und suchen Sie in Aufgabe 3-1 bis Aufgabe 3-3 die Lösung mit folgenden Methoden:
• GDG-Problemlöser mit statespace-Funktion
• Löser für gewöhnliche Differentialgleichungen
• Lösungsblock
Problemdefinition
Betrachten Sie das klassische Masse-Feder-Dämpfer-System:
Die dynamische Gleichung für dieses System ist durch die folgende Gleichung gegeben:

Sie können dieses System mit einem statespace-Modell folgendermaßen darstellen:

Dabei gilt:
• A – Zustandsmatrix
• B – Eingangsmatrix
• C – Ausgabematrix
• D – Direktübertragungsmatrix
• x – Zustandsvektor
• u – Eingang
• y – Gemessene oder gesteuerte Ausgabe
Das lineare System oben erhalten Sie, indem Sie die Zustands- und die nichtlinearen Ausgabegleichungen, die die Systemdynamik modellieren, linearisieren. |
Verwenden Sie für dieses System zweiter Ordnung zwei Zustandsvariablen.


Vorausgesetzt, m = 1, b = 0.5 und k = 3, lauten die Systemgleichungen wie folgt:


In Form einer statespace-Matrix wird das Modell wie folgt dargestellt:


GDG-Problemlöser mit statespace-Funktion
1. Definieren Sie die Matrizenfunktionen A, B, C und D.
 |  |
 |  |
2. Legen Sie die Eingabe als Heaviside-Sprungfunktion fest. Geben Sie zum Einfügen der Sprungfunktion F ein, und drücken Sie dann STRG+G.

3. Definieren Sie die Anfangsbedingungen der beiden Variablen. Zur Eingabe von i als tiefgestelltem Buchstabenindex klicken Sie auf der Registerkarte Rechnen in der Gruppe Stil auf Tiefgestellt und geben dann i ein.

4. Definieren Sie das Zeitfenster, in dem Sie die Systemlösung suchen möchten.


5. Definieren Sie die Anzahl der Punkte, an denen Sie die Lösung suchen möchten, ausgenommen ti.

6. Rufen Sie die Funktion statespace auf.

Die erste Spalte von Matrix sol enthält den Zeitpunkt, an dem die Lösung gefunden wird. Die übrigen Spalten enthalten die Zustandsvariablen x1 und x2 zu diesem Zeitpunkt.
7. Extrahieren Sie t, x1 und x2 aus der Matrix sol.
 |  |  |
 |  |  |
8. Berechnen Sie den Mittelwert und das Maximum von x1.


9. Plotten Sie x1 für den Zeitverlauf, und verwenden Sie Markierungen, um die Mittelwerte und Maxima anzuzeigen.
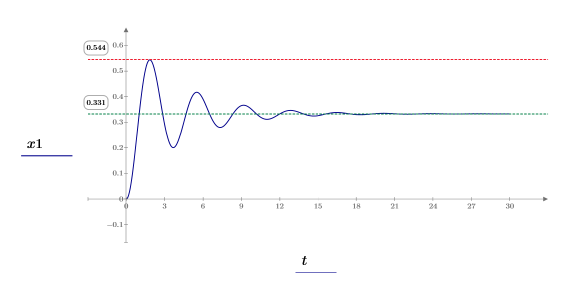
Der Plot zeigt die transienten Antwortmerkmale, wie Anregelzeit, Überschwingung und Einschwingzeit.