• wiener2d(M, win_h, win_w) - 너비가 win_w 픽셀이고 높이가 win_h 픽셀인 국소 창을 사용하여 M에 대한 2D 적응 Wiener 필터링을 수행합니다.
Wiener 필터링은 이미지에 부가적으로 발생한 임의 노이즈를 줄이기 위해 개발된 초기 방법 중 하나입니다. 이 필터링 방법은 픽셀의 위치와 무관하게 정적인 임의 프로세스로 부가적인 노이즈가 발생한다는 가정을 바탕으로 하며, 원본 이미지와 재구축된 이미지 간의 제곱 오류를 최소화하는 알고리즘입니다. Wiener 필터링은 저역 통과 필터이지만 단일 차단 주파수 대신 저역 세부 영역에서는 저역 차단 주파수를 사용하고 가장자리나 기타 고역 분산 피쳐가 있는 영역에서는 고역 차단 주파수를 사용하여 세부 사항을 유지하도록 설계된 공간 변이 필터입니다. 창 크기가 전체적인 주파수 차단을 결정합니다. 큰 창은 저역 차단 주파수에 해당하므로 더 많이 흐릿해지며 노이즈 감소 효과가 커집니다.
Wiener 필터링을 구현하는 방법은 다양합니다. 이 PTC Mathcad 함수에서 사용하는 방법은 1980년에 Lim이 제안한 픽셀 단위 2D 적응 Wiener 필터링입니다(Two-Dimensional Signal and Image Processing, Jae S. Lim 저서, 536-540페이지 참조). 이 방법에서는 공간 변이 필터를 사용하고 부가적인 노이즈는 흰색 및 0 평균이 된다고 가정합니다.
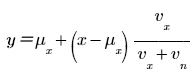
이 알고리즘에서 필터링된 이미지의 픽셀 y는 다음과 같은 변환을 통해 노이즈가 추가된 입력 이미지의 픽셀 x에서 유도됩니다.
여기서, μx 및 vx는 픽셀 주위의 근방(근방 크기는 함수의 win_h 및 win_w 인수로 지정됨)에서 x의 평균 및 분산이고, vn은 입력 이미지에서 예상되는 부가적인 노이즈의 분산입니다. 출력의 각 픽셀은 입력 픽셀 근방의 국부 평균과 국부 대비 항(x - μx)의 합입니다. 여기서 국부 대비 항은 노이즈 분산(vn)이 이미지 분산(vx)보다 상당히 작은 고역 상세 영역에서는 필터링이 최소화되도록 배율 조정 요소가 1에 근접하고 출력 픽셀 y가 입력 픽셀 x에 근접하며, 이미지 분산이 낮은 저역 상세 영역에서는 출력 픽셀이 국부 평균(저역 통과 필터 결과)과 유사하도록 조정됩니다.
이미지의 경계는 0 그레이스케일 값으로 확장된다고 간주합니다. 따라서 이미지 경계 근처(근방 창의 크기까지)에서 출력 픽셀이 무효화될 수 있습니다. 근방 창은 입력 이미지보다 클 수 없습니다.