In der vorherigen Aufgabe haben Sie ein Masse-Feder-Dämpfer-System mit einem GDG-Problemlöser mit statespace-Funktion gelöst. Zur Lösung des vorliegenden Problems können Sie ebenfalls GDG-Problemlöser verwenden. Zur Erinnerung: Die dynamische Gleichung lautete wie folgt:
Die Systemparameter waren m = 1, b = 0.5 und k = 3. Bei der Eingabe handelte es sich um eine Heaviside-Sprungfunktion, u(t) = Φ(t). Sie können die Gleichung zweiter Ordnung bezüglich GDGs erster Ordnung umschreiben:
1. Definieren Sie eine Vektorfunktion unter Angabe der rechten Seite des Systems.
Die Argumente von D sind t, die unabhängige Variable, und X, der Vektor der abhängigen Variablen:
2. Definieren Sie die Anfangswerte für x1 und x2.
3. Definieren Sie die Anfangs- und Endzeiten, über deren Verlauf die Lösung ausgewertet werden soll.
4. Definieren Sie die Anzahl der Zeitschritte.
5. Rufen Sie den AdamsBDF-Problemlöser auf, um die Lösung auszuwerten.
◦ Der AdamsBDF-Problemlöser ist ein gemischter Hybrid-Löser. Er beginnt mit dem nicht steifen Adams-Problemlöser. Falls das Problem als steif identifiziert wird, erfolgt ein Wechsel zum steifen BDF-Problemlöser.
◦ Sie können den AdamsBDF-Problemlöser auch durch einen anderen GDG-Problemlöser ersetzen. Weitere Informationen erhalten Sie im Thema "Lösungsalgorithmen für Differentialgleichungen" in der Hilfe.
◦ Die Lösung ist eine dreispaltige Matrix mit der Zeit, der Verschiebung und der Geschwindigkeit des Systems für jeden der N-Schritte:
6. Extrahieren Sie die Zeit und die Verschiebung aus Sol, und plotten Sie sie in Abhängigkeit voneinander.
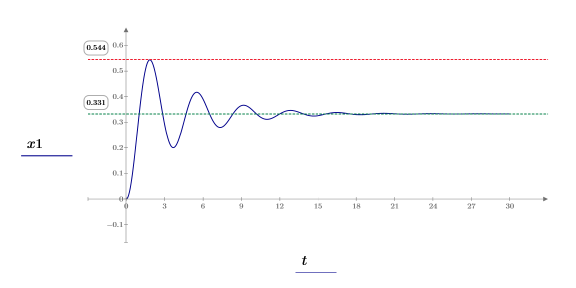
7. Berechnen Sie den Mittelwert und das Maximum von x.
8. Plotten Sie x für den Zeitverlauf, und verwenden Sie Markierungen, um die Mittelwerte und Maxima anzuzeigen.
Der Plot zeigt die transienten Antwortmerkmale, wie Anregelzeit, Überschwingung und Einschwingzeit.