Uso de los pares de engranajes en los análisis de Mechanism Dynamics
La presencia de un par de engranajes en el mecanismo puede afectar a los resultados de un análisis en el que se tenga en cuenta la masa. En cada engranaje del par se incluye un cuerpo rígido denominado engranaje, cremallera o piñón, y un segundo cuerpo que recibe el nombre de soporte, conectado por un eje de movimiento. Una forma de garantizar que la geometría del par de engranajes conserve la orientación espacial deseada durante un análisis consiste en utilizar el mismo cuerpo rígido como soporte para ambos engranajes. Puede ser el cuerpo suelo u otro cuerpo rígido del mecanismo. En la figura se muestra un par de engranajes estándar simple en el que las dos piezas que se utilizan como cuerpos de soporte (bloques rojos) pertenecen al mismo cuerpo rígido.
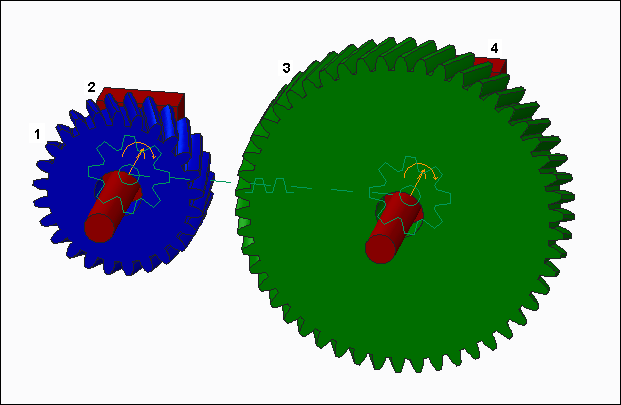
1. Engranaje 1
2. Soporte 1
3. Engranaje 2
4. Soporte 2
Si se crea un par de engranajes en el que éstos no tienen un cuerpo soporte común, podrán verse afectados los resultados de un análisis dinámico, estático o de equilibrio de fuerzas. El software crea un cuerpo interno invisible para los pares de engranajes sin cuerpo soporte común. Se asigna al cuerpo rígido una masa igual a 0.001 (la masa del cuerpo rígido más pequeño) en el conjunto. Al ejecutar un análisis dinámico, estático o de equilibrio de fuerzas, puede aparecer un mensaje en el que se indica que una de las conexiones por engranajes no dispone de un cuerpo soporte común. El uso de la masa del cuerpo interno invisible puede afectar desfavorablemente a los resultados de los análisis. En este caso, se debe detener el análisis y volver a diseñar el mecanismo de modo que el par de engranajes incluya un cuerpo de soporte común. En caso contrario, se podrá continuar el análisis con el cuerpo interno invisible.
(la masa del cuerpo rígido más pequeño) en el conjunto. Al ejecutar un análisis dinámico, estático o de equilibrio de fuerzas, puede aparecer un mensaje en el que se indica que una de las conexiones por engranajes no dispone de un cuerpo soporte común. El uso de la masa del cuerpo interno invisible puede afectar desfavorablemente a los resultados de los análisis. En este caso, se debe detener el análisis y volver a diseñar el mecanismo de modo que el par de engranajes incluya un cuerpo de soporte común. En caso contrario, se podrá continuar el análisis con el cuerpo interno invisible.
(la masa del cuerpo rígido más pequeño) en el conjunto. Al ejecutar un análisis dinámico, estático o de equilibrio de fuerzas, puede aparecer un mensaje en el que se indica que una de las conexiones por engranajes no dispone de un cuerpo soporte común. El uso de la masa del cuerpo interno invisible puede afectar desfavorablemente a los resultados de los análisis. En este caso, se debe detener el análisis y volver a diseñar el mecanismo de modo que el par de engranajes incluya un cuerpo de soporte común. En caso contrario, se podrá continuar el análisis con el cuerpo interno invisible.