Tipos de pares de engranajes dinámicos
Cada tipo de par de engranajes se define por los ejes de movimiento, tal como se muestra en la siguiente tabla.
Cada tipo de par de engranajes se define según sus ejes de movimiento.
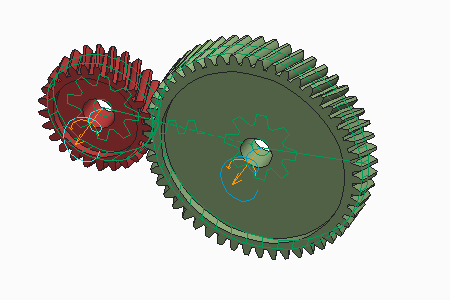
• Recto: dos cilindros que ruedan uno contra otro donde se juntan los diámetros del círculo primitivo. Las fuerzas de reacción entre los engranajes se calculan según la torsión transferida, los diámetros de los engranajes y los ángulos de mecanizado. Los engranajes rectos pueden tener un ángulo helicoidal y también se pueden denominar engranajes rectos helicoidales.
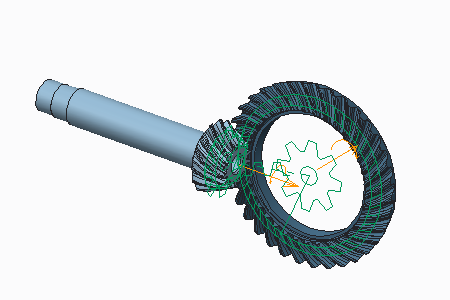
• Bisel: dos conos que ruedan uno contra otro donde se juntan los diámetros del círculo primitivo. Las fuerzas de reacción entre los engranajes se calculan según la torsión transferida, los diámetros de los engranajes y los ángulos de mecanizado. Los engranajes cónicos pueden tener un ángulo helicoidal y también se pueden denominar engranajes cónicos helicoidales. Cuando los ejes son paralelos, un engranaje cónico funcionará como un engranaje recto.
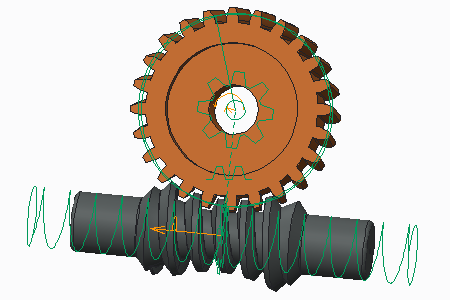
• Tornillo sinfín: dos engranajes de tamaños diferentes, donde el cuerpo del tornillo sinfín es más pequeño con un eje más largo que el cuerpo de rueda. Los engranajes de tornillo sinfín se definen como cilindros que se deslizan unos contra otros donde se encuentran los diámetros de los círculos primitivos. Se utilizan cuando se requiera que la relación de reducción sea grande.
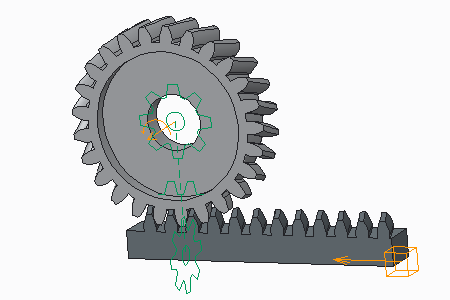
• Cremallera y piñón: permite transferir el movimiento de rotación al movimiento de traslación o viceversa. Un par de engranajes de cremallera y piñón se define como un cilindro que rueda en la superficie de paso de la cremallera. Las fuerzas de reacción entre los engranajes se calculan según la torsión transferida, la separación de los engranajes y los ángulos de mecanizado.