배치 제약 조건 사용 정보
배치 제약 조건은 한 쌍의 참조의 상대적인 위치를 지정합니다. 제약 조건을 배치할 때 다음과 같은 일반 원칙을 따르십시오.
• 제약 조건에 대한 오프셋 값을 입력하면 오프셋 방향이 표시됩니다. 반대 방향을 선택하려면 노란색 화살표를 클릭하고 음수 값을 입력하거나 그래픽 창에서 끌기 핸들을 끕니다.
• 제약 조건은 한 번에 하나씩 추가됩니다. 단일 제약 조건을 사용하여 한 부품의 서로 다른 두 구멍을 다른 부품의 서로 다른 두 구멍에 정렬할 수 없습니다. 두 개의 개별적인 제약 조건을 정의해야 합니다.
• 배치 제약 조건 세트를 사용하면 배치와 방향을 완전하게 정의할 수 있습니다. 예를 들어, 한 쌍의 서피스는 일치하도록 구속하고, 두 번째 쌍은 평행이 되도록 구속하고, 세 번째 쌍은 수직이 되도록 구속할 수 있습니다.
• 회전된 서피스는 단면을 회전시키거나 호 또는 원을 밀어내어 생성한 서피스입니다. 배치 제약 조건에서 사용할 수 있는 서피스는 평면, 원통, 원추, 원환 및 구입니다.
• 동일 서피스는 근원 서피스와 가상의 모서리를 통해 연결된 모든 서피스를 포함하는 서피스 세트를 나타냅니다. 예를 들어 밀어내기(Extrude) 또는 회전(Revolve)을 통해 생성한 원통형 서피스는 두 개의 가상 모서리를 통해 연결된 두 개의 서피스로 구성됩니다. 참조로 사용할 수 있는 서피스는 원통, 원추, 구 및 원환체입니다.
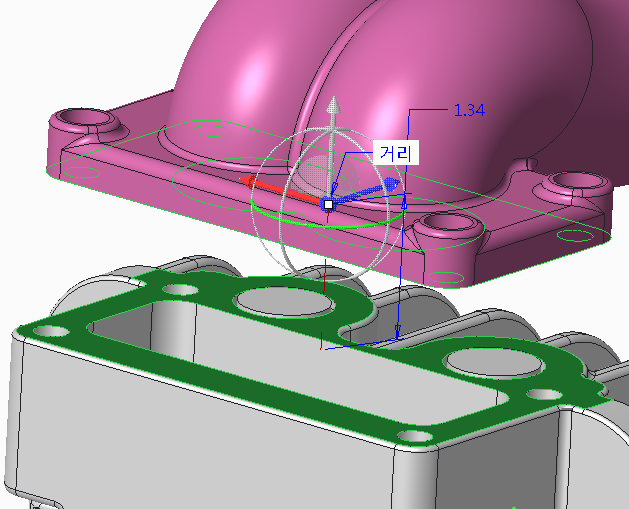
거리 제약 조건
거리(Distance) 제약 조건을 사용하여 어셈블리 참조로부터 설정한 거리에 컴포넌트 참조를 배치할 수 있습니다. 거리(Distance) 제약 조건에 대한 추가 면맞춤(Mate) 또는 정렬(Align) 레이블을 표시하려면 일치 및 거리 제약 조건에 대한 면맞춤과 정렬 표시 정보 항목을 참조하십시오. 거리(Distance) 제약 조건에 대한 참조는 점-점, 점-선, 선-선, 일반-일반, 평면 서피스-평면 서피스, 점-평면 또는 선-평면일 수 있습니다.
아래 그림에서는 부품의 하단 서피스가 선택한 어셈블리 서피스로부터 30.00 떨어진 거리에 있습니다.
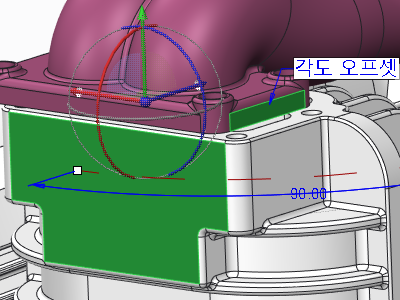
각도 오프셋
각도 오프셋(Angle Offset) 제약 조건을 사용하여 선택한 컴포넌트 참조를 선택한 어셈블리 참조와 각을 이루도록 배치합니다. 각도(Angle) 제약 조건에 대한 참조는 선-선(동일평면 선), 선-평면 또는 일반-일반일 수 있습니다.
아래 그림에서는 어셈블되는 부품의 서피스가 선택한 어셈블리 서피스(녹색)와 90.00도의 각을 이룹니다.
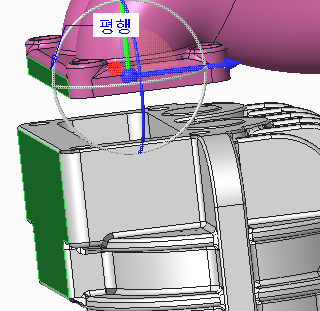
평행 제약 조건
평행(Parallel) 제약 조건을 사용하여 컴포넌트 참조를 어셈블리 참조와 평행하게 배치합니다. 평행(Parallel) 제약 조건에 대한 참조는 선-선, 선-평면 또는 일반-일반일 수 있습니다.
아래 그림에서는 어셈블되는 부품(녹색)의 서피스가 선택한 어셈블리 서피스(녹색)와 평행합니다.
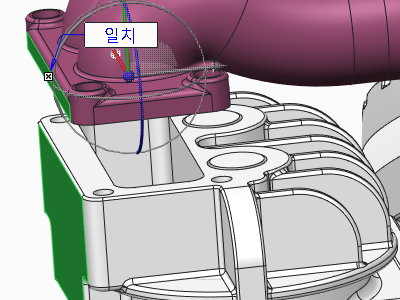
일치 제약 조건
일치(Coincident) 제약 조건을 사용하여 컴포넌트 참조를 어셈블리 참조와 일치하게 배치합니다. 일치(Coincident) 제약 조건에 대한 추가 면맞춤(Mate) 또는 정렬(Align) 레이블을 표시하려면 면맞춤 및 정렬 일치 및 거리 제약 조건 표시 정보 항목을 참조하십시오. 일치(Coincident) 제약 조건에 대한 참조는 점, 선, 평면이나 평면 서피스, 원통, 원추, 커브 상 점이거나 이러한 참조의 조합일 수 있습니다.
기본 제약 조건을 일치(Coincident)로 설정하려면 auto_constr_always_use_offset 구성 옵션을 never로 설정합니다.
아래 그림에서는 어셈블되는 부품의 측면 서피스가 측면 서피스 어셈블리 참조와 일치합니다.
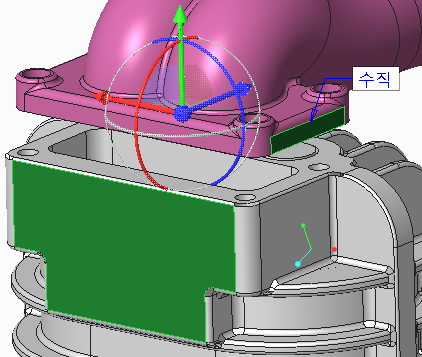
수직 제약 조건
수직(Normal) 제약 조건을 사용하여 컴포넌트 참조를 어셈블리 참조와 수직하게 배치합니다. 참조는 선-선(동일평면 선), 선-평면 또는 일반-일반일 수 있습니다.
아래 그림에서는 어셈블되는 부품(녹색)의 서피스가 선택한 어셈블리 서피스(녹색)와 수직입니다.
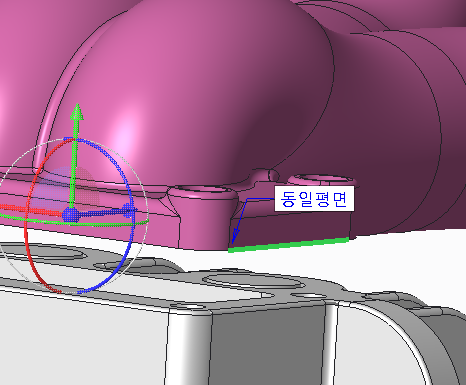
동일평면 제약 조건
동일평면(Coplanar) 제약 조건을 사용하여 컴포넌트 모서리, 축, 의도 기준축 또는 서피스를 유사한 어셈블리 참조와 동일평면이 되게 배치합니다. 선-선만 참조로 사용할 수 있습니다.
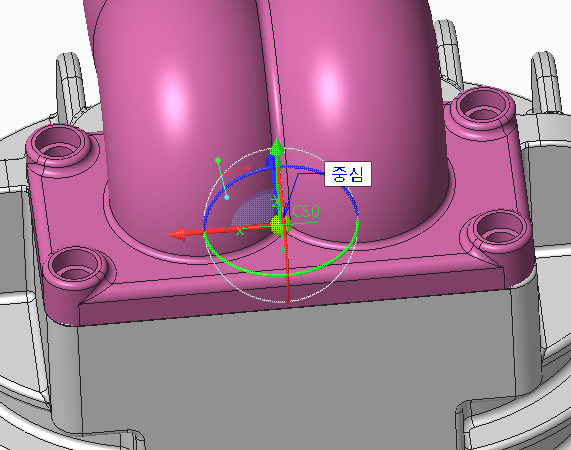
중심 제약 조건
중심(Centered) 제약 조건을 사용하여 원추형 서피스, 구형 서피스 및 원환형 서피스 쌍의 중심을 맞춥니다. 서피스, 좌표계 또는 의도 좌표계 쌍을 선택할 수 있습니다. 참조는 원추-원추, 원환체-원환체 또는 구-구일 수 있습니다. 좌표계 또는 의도 좌표계를 참조로 선택하면 좌표계 원점이 3 자유도와 정렬됩니다.
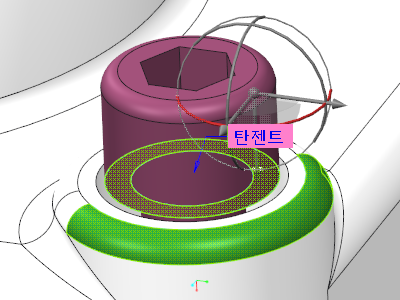
탄젠트 제약 조건
탄젠트(Tangent) 제약 조건을 사용하여 탄젠트화 지점에서 두 서피스의 접촉을 제어할 수 있습니다. 이 제약 조건의 사용 예로는 캠과 그 작동기 간의 접촉 서피스 또는 점이 있습니다.
기본 제약 조건
시스템에서 생성한 컴포넌트의 기본 좌표계를 시스템에서 생성한 어셈블리의 기본 좌표계와 정렬하려면 기본값(Default) 제약 조건을 사용합니다. 시스템은 컴포넌트를 어셈블리 원점에 배치합니다. 참조는 좌표계-좌표계 또는 점-좌표계일 수 있습니다.
고정 제약 조건
고정(Fix) 제약 조건은 이동되거나 패키지된 컴포넌트의 현재 위치를 고정합니다.
방향 제약 조건
한 부품에서 두 개의 다른 축을 다른 부품에서 두 개의 다른 축을 사용하여 구속하려면 방향(Oriented) 제약 조건을 두 번째 제약 조건으로 사용합니다. 이 제약 조건은 한 부품의 두 번째 축이 다른 부품의 두 번째 축과 정확하게 일치하지 않는 경우에 유용합니다. 방향(Oriented) 제약 조건을 사용하려면 다음 조건이 존재해야 합니다.
• 첫 번째 축 쌍이 일치(Coincident) 제약 조건을 사용하여 구속되어 있습니다.
• 두 부품의 축이 동일한 평면에 있고 서로 평행합니다.