미리 정의된 구속 세트 정보
미리 정의된 구속 세트는 어셈블리에서 컴포넌트의 이동을 정의합니다. 미리 정의된 구속 세트에는 동작 축의 유무와 상관없이 연결 유형을 정의하는 구속이 포함됩니다. 연결은 특정 유형의 동작을 정의합니다. 원하는 동작 유형을 구성하는 연결을 결정한 후 목록에서 연결을 선택하면 적절한 구속이 나타납니다. 이러한 구속을 삭제하거나 변경하거나 제거할 수 있습니다. 새 구속은 추가할 수 없습니다. 모델 트리에서 고유 아이콘  을 사용하여 사전 정의된 제약 조건 세트로 배치된 컴포넌트를 나타냅니다.
을 사용하여 사전 정의된 제약 조건 세트로 배치된 컴포넌트를 나타냅니다.
을 사용하여 사전 정의된 제약 조건 세트로 배치된 컴포넌트를 나타냅니다.강성(Rigid), 용접(Weld), 사용자 정의(User-Defined), 볼(Ball) 및 짐벌(Gimbal) 등의 미리 정의된 세트에는 동작 축이 없습니다. 볼(Ball) 및 짐벌(Gimbal) 구속 세트에는 동작은 있지만 축은 없습니다.
Mechanism Design에서는 미리 정의된 모든 구속 세트를 편집할 수 있습니다. 자세한 내용은 도움말 센터를 검색하십시오.
탐색 및 집합 영역에서 동작 축을 선택합니다. 동작 축 특성을 지정할 수 있는 동작 설정 특성 영역이 나타납니다.
세트 유형
미리 정의된 구속 세트로 배치된 컴포넌트에서 구속이 부족한 것은 하나 이상의 자유도를 유지하기 위한 의도적인 것입니다. 미리 정의된 구속 세트를 구성한 후 컴포넌트를 드래그하여 원하는 동작이 가능하도록 올바르게 배치되었는지 확인합니다.
• 강성(Rigid) - 서로 상대적으로 이동하지 않게 두 컴포넌트를 연결합니다. 두 컴포넌트는 유효한 구속 세트로 구속됩니다. 이렇게 연결된 컴포넌트는 단일 바디가 됩니다. 강성 연결 세트 구속은 사용자정의 구속 세트와 유사합니다.
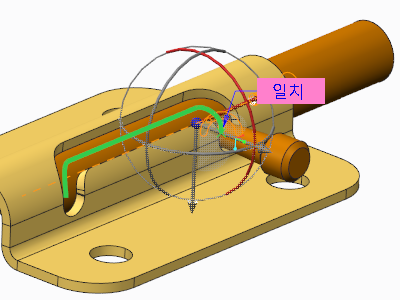
• 핀(Pin) - 1 자유도로 해당 축을 따라 회전하거나 이동할 수 있게 컴포넌트를 참조된 축에 연결합니다. 축 참조로는 축, 모서리, 커브 또는 서피스를 선택합니다. 변환 참조로는 기준점, 정점 또는 서피스를 선택합니다. 핀(Pin) 연결 세트에는 축 정렬과 일치의 두 구속이 있습니다.
• 슬라이더(Slider) - 1 자유도로 해당 축을 따라 이동할 수 있게 컴포넌트를 참조된 축에 연결합니다. 정렬 참조로는 모서리나 정렬 축을 선택합니다. 회전 참조로 서피스를 선택합니다. 슬라이더(Slider) 연결 세트에는 축 정렬 그리고 축을 따르는 회전을 제한하는 일치의 두 구속이 있습니다.
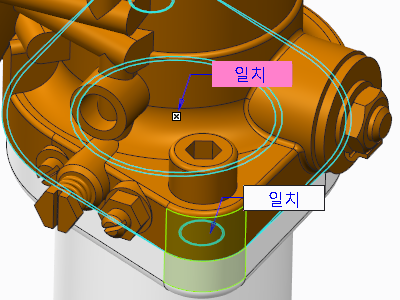
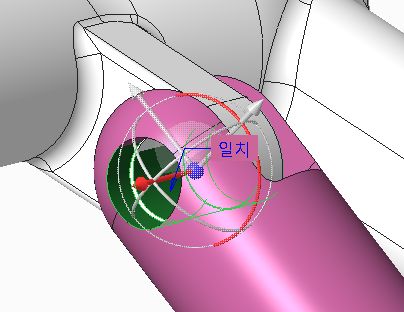
• 원통(Cylinder) - 2 자유도로 특정 축을 따라 이동하거나 축 기준으로 회전하도록 컴포넌트를 연결합니다. 축 정렬 참조로는 축, 모서리 또는 커브를 선택합니다. 원통(Cylinder) 연결 세트에는 구속 하나만 있습니다.
• 평면(Planar) - 평면에서 2 자유도로 서로 상대적인 이동을 하고 해당 평면에 수직한 축(아래 그림에서 화살표)을 중심으로 1 자유도로 회전하도록 컴포넌트를 연결합니다. 일치 구속을 적용할 서피스 참조를 선택합니다. 평면(Planar) 연결 세트에는 평면 면맞춤 또는 정렬 구속 하나만 있습니다. 면맞춤 또는 정렬 구속은 전환하거나 오프셋할 수 있습니다.
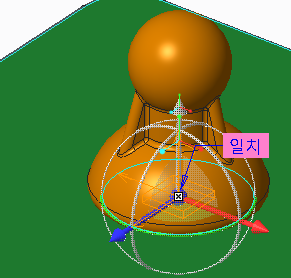
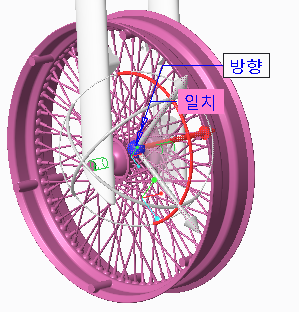
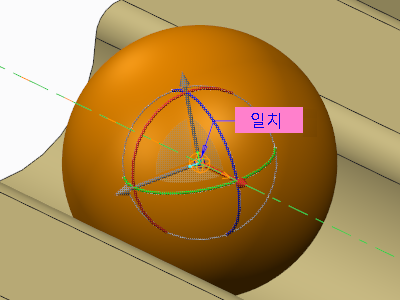
• 볼(Ball) - 어떤 방향이든 3개의 자유도로 회전할 수 있도록(360° 회전) 컴포넌트를 연결합니다. 정렬 참조로는 점, 정점 또는 커브 끝을 선택합니다. 볼(Ball) 연결 세트에는 점대점 일치 구속 하나만 있습니다.
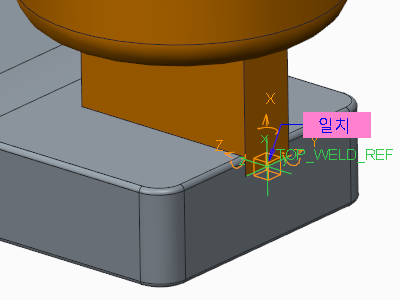
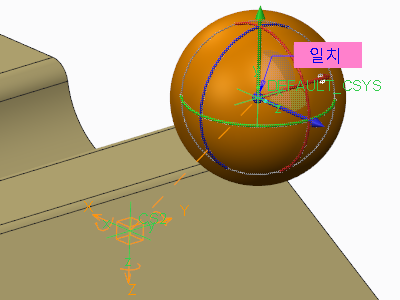
• 용접(Weld) - 서로 상대적으로 이동하지 않게 컴포넌트를 연결합니다. 컴포넌트의 좌표계를 어셈블리의 좌표계에 정렬하여 어셈블리에 컴포넌트를 배치합니다. 어셈블리에서 열린 자유도를 사용하여 컴포넌트를 조정할 수 있습니다. 용접(Weld) 연결에는 좌표계 정렬을 위한 일치 구속 하나만 있습니다.
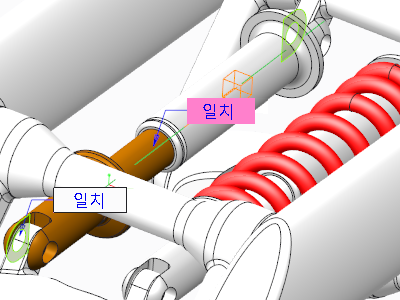
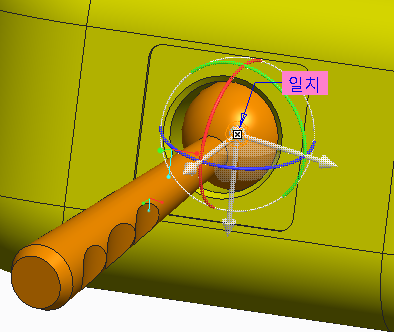
• 베어링(Bearing) - 4 자유도로 볼(Ball) 및 슬라이더(Slider) 연결을 조합한 세트입니다. 360° 회전을 위한 3개의 자유도와 참조된 축을 따른 이동이 있습니다. 첫 번째 참조로 컴포넌트나 어셈블리상의 점을 선택합니다. 두 번째 참조로 어셈블리나 컴포넌트에서 모서리, 축 또는 커브를 선택합니다. 점 참조는 모서리를 기준으로 자유롭게 회전할 수 있으며 해당 길이 방향으로 이동할 수 있습니다. 베어링(Bearing) 연결에는 모서리 상 점 일치 구속 하나만 있습니다.
• 일반(General) - 사용자정의 세트의 구속과 동일한 구속을 한두 개 구성할 수 있습니다. 일반(General) 연결에는 탄젠트, 커브 상 점 및 비평면 서피스 상 점 구속을 사용할 수 없습니다.
• 6자유도(6DOF) - 구속이 적용되지 않기 때문에 어셈블리와 관련한 컴포넌트 동작에 영향을 주지 않습니다. 컴포넌트 좌표계가 어셈블리 좌표계에 정렬됩니다. X, Y 및 Z 어셈블리 축은 회전과 변환에 사용되는 동작 축입니다.
X, Y 및 Z 어셈블리 축은 회전과 변환에 사용되는 동작 축입니다. 3개의 변환 DOF가 독립적입니다. X축 회전 DOF만 독립적입니다. Y축은 X축에 종속되며 Y축의 독립적인 회전을 위해 서보 모터를 사용하여 X축을 잠글 수 있습니다. Z축은 X축과 Y축 모두에 대해 종속됩니다. 명확한 Z축 회전을 갖도록 X축과 Y축을 모두 잠가야 합니다.
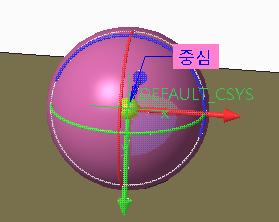
• 짐벌(Gimbal) - 중심 구속이 하나 있는 피봇 조인트입니다. 좌표계 중심은 정렬되지만 자유 회전을 허용하기 위해 축은 정렬되지 않습니다.
• 슬롯(Slot) - 직선이 아닌 궤적 상의 점입니다. 이 연결의 자유도는 4이고 점은 세 방향으로 궤적을 따릅니다. 첫 번째 참조로는 컴포넌트나 어셈블리상의 점을 선택합니다. 참조된 점은 직선이 아닌 참조 궤적을 따릅니다. 궤적에는 연결이 구성될 때 설정된 끝점이 있습니다. 슬롯(Slot) 연결에는 여러 모서리나 커브 구속에 대한 단일 점 정렬이 있습니다.