關於預定義的條件約束集
預定義的條件約束集可定義元件在組件內的移動。預定義的條件約束集包含可定義連接對類型(有或沒有運動軸)的條件約束。連接對可定義某種特定的運動類型。當您確定可進行所要之運動的連接對後,請從清單中選取該連接對,相應的條件約束隨即出現。不能刪除、變更或移除這些條件約束。不能新增條件約束。「模型樹」中會使用唯一圖示  來指示使用預先定義條件約束集放置的元件。
來指示使用預先定義條件約束集放置的元件。
來指示使用預先定義條件約束集放置的元件。「剛性」(Rigid)、「焊接」(Weld)、「使用者定義」(User-Defined)、「球」(Ball) 和「萬向」(Gimbal) 等預先定義集合沒有運動軸。「球」(Ball) 和「萬向」(Gimbal) 條件約束集合有運動,但沒有軸。
在機械設計下,所有預定義的條件約束集都是可以編輯的。如需詳細資訊,請搜尋「說明中心」。
在導覽和集合區內選取運動軸。「運動設定屬性」(Motion Settings Properties) 區出現,您可在其中指定運動軸屬性。
集合類型
使用預定義條件約束集放置的元件會因為使用者想要保留一或多個自由度而致使元件的限制不足。配置好預定義條件約束集後,拖曳元件以確保元件放在正確位置以實現所需運動。
• 「剛性」(Rigid) - 將兩個元件連接在一起,以使其不會相對於彼此移動。將使用任何有效的條件約束集合來限制它們。以這種方式連接的元件會變成單個主體。固定連接對集條件約束與使用者定義的條件約束集類似。

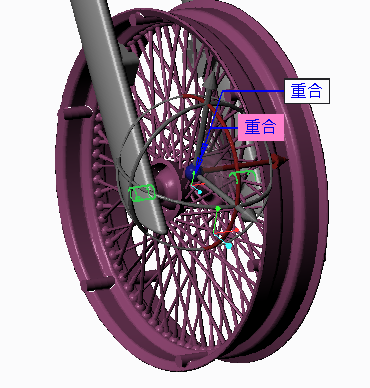
• 插銷 (Pin) - 將元件連接至參照軸,使元件沿著此軸以一個自由度旋轉或移動。選取軸、邊、曲線或曲面作為軸參照。選取基準點、頂點或曲面作為平移參照。「插銷」(Pin) 連接對集有兩種條件約束:軸對齊和重合。
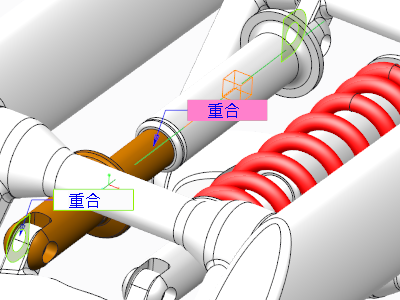
• 滑塊 (Slider) - 將元件連接至參照軸,使元件沿著該軸以一個自由度移動。選取邊或對齊軸作為對齊參照。選擇曲面作為旋轉參照。「滑塊」(Slider) 連接對集有兩種條件約束:軸對齊與重合,可用於限制沿軸的旋轉。
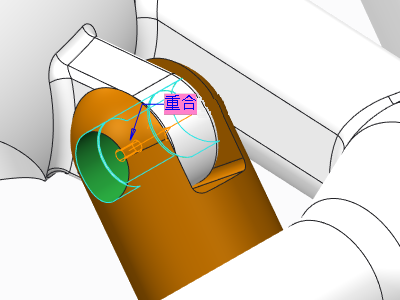
• 圓柱體 (Cylinder) - 連接元件,使其以兩個自由度沿著特定軸移動或繞著特定軸旋轉。選取軸、邊或曲線作為軸對齊參照。「圓柱體」(Cylinder) 連接對集有一個條件約束。
• 「平面」(Planar) - 連接多個元件,使它們在平面中相對於彼此移動,在平面中具有兩個自由度,繞與該平面垂直的軸有一個自由度 (如下圖箭頭所指處)。選取重合條件約束的曲面參照。「平面」(Planar) 連接對集有一個平面貼合或對齊條件約束。可反向或位移貼合或對齊條件約束。
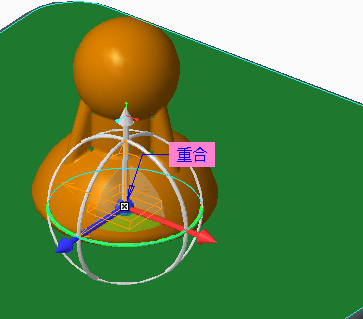
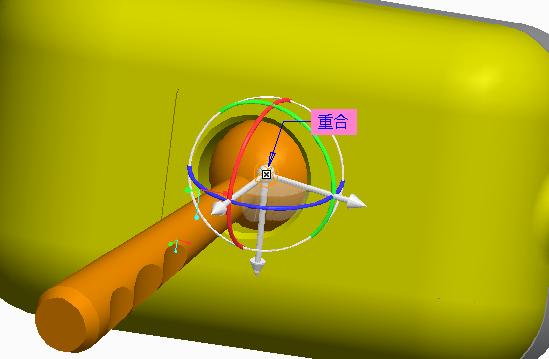
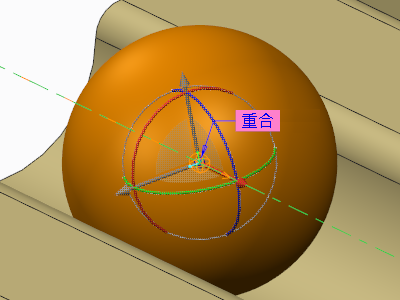
• 球 (Ball)—連接元件,使其可朝任意方向旋轉,具有三個自由度 (360° 旋轉)。選取對齊參照的點、頂點或曲線端點。「球」(Ball) 連接對集具有一個點對點重合條件約束。
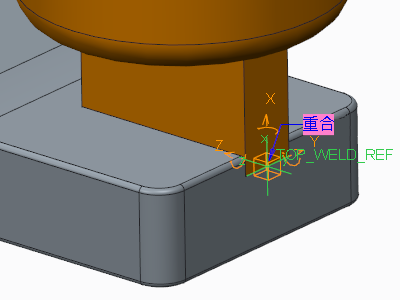
• 焊接 (Weld) - 將一個元件與另一個元件連接在一起,使它們不會相對於彼此移動。透過將元件的座標系與組件中的座標系對齊,以將元件置於組件內。在組件內使用開放式自由度可對元件進行調整。「焊接」(Weld) 連接對具有一個重合條件,用於對齊座標系。
• 軸承 (Bearing) - 「球」(Ball) 與「滑塊」(Slider) 連接對的組合,具有四個自由度。具有三個自由度 (以進行 360° 旋轉),且可沿著參照軸移動。選擇元件或組件上的點作為第一參照。選擇組件或元件上的邊、軸或曲線作為第二參照。點參照可繞著邊自由旋轉,也可以沿著其長度移動。「軸承」(Bearing) 連接對具有一個邊上點重合條件約束。
• 一般 (General) - 有一或兩個可配置的條件約束,與使用者定義集合內的條件約束相同。「一般」(General) 連接對無法使用相切、點在曲線上,以及點在非平面曲面上等限制。
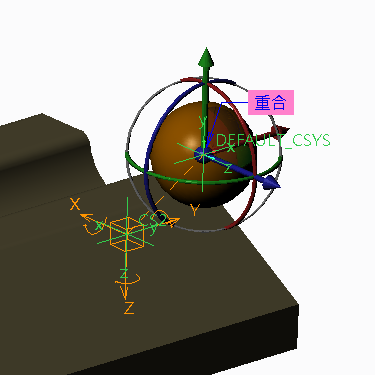
• 6DOF (6DOF) - 不影響元件相對於組件的運動,因為未應用任何條件約束。元件的座標系與組件中的座標系對齊。X、Y 和 Z 組件軸為運動軸,可繞這些軸旋轉或沿其而平移。
X、Y 和 Z 組件軸為運動軸,可繞這些軸旋轉或沿其而平移。3 個平移 DOF 相互獨立。僅 x 軸旋轉 DOF 獨立。y 軸相依于 x 軸,要使 y 軸獨立旋轉,可透過伺服馬達鎖定 x 軸。z 軸相依於 x 軸和 y 軸。要使 z 軸獨立旋轉,必須同時鎖定 x 軸和 y 軸。
• 「萬向」(Gimbal) - 具有置中條件約束的樞軸連接點。會對齊座標系中心,但不會對齊軸,以允許自由旋轉。
• 槽 (Slot) - 點在非直線軌跡上。此連接對有四個自由度,其中點在三個方向上沿著軌跡而變動。在元件或組件上選擇一個點作為第一參照。參照點沿著非直線的參照軌跡而變動。軌跡具有配置連接對時所設定的端點。「槽」(Slot) 連接對具有一個點與多邊或多曲線對齊的條件約束。
