캠-종동체 연결 설계 정보
캠-종동체 연결을 성공적으로 설계하려면 작업 평면에 대한 개념을 이해해야 합니다. 해석을 수행하면 서피스나 커브에서 생성한 모든 캠이 2차원 캠으로 처리됩니다. 서피스를 선택할 경우에는 해당 서피스가 깊이 방향으로 무한대로 확장되는 것으로 해석됩니다. 커브를 선택할 경우에는 시각화를 위해 캠이 깊이 방향으로 확장될 수 있도록 깊이 방향을 지정해야 합니다. 그리고 작업 평면은 깊이나 밀어내기 방향과 직각이 됩니다.
|
|
생성 과정에서 작업 평면 내에 캠 수직이 자홍색 화살표로 표시됩니다.
|
캠-종동체 연결 설계
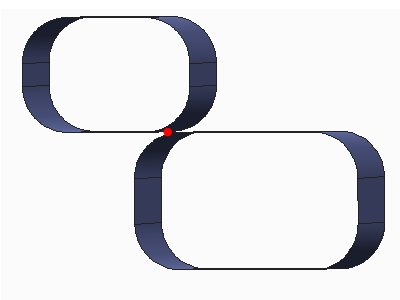
캠-종동체 연결을 설계할 때는 캠을 작업 평면에서 2D 그림으로 시각화하는 것이 편리합니다. 두 개의 캠이 작업 평면의 점에서 서로 접촉하면 더 좋은 결과를 얻을 수 있습니다. 작업 평면의 선을 따라 연결되는 설계는 피하는 것이 좋습니다.
그림의 다음 표에서는 작업 평면이 보기 평면과 일치한다고 가정합니다. 밀어내기 방향은 보기 평면에 수직으로 안쪽을 향합니다. 왼쪽 이미지에서 작업 평면의 두 캠 사이의 연결은 점에서 발생합니다. 3D 보기에서 연결은 작업 평면에 수직인 선이 됩니다.
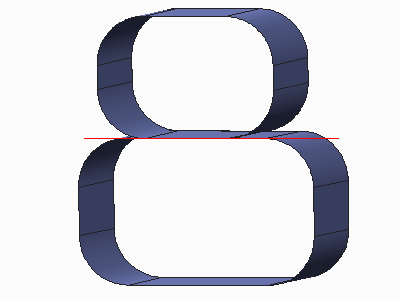
오른쪽 이미지에서 작업 평면의 두 캠 사이의 연결은 작업 평면 내에 있는 선에서 발생합니다. 3D 보기에서 연결은 평면을 따라 표시됩니다.
|
적합한 접촉
|
부적합한 접촉
|
 |
 |
설계 원칙
주의 사항:
• 캠(3D에서)이 작업 평면에 수직인 선을 따라 접촉하도록 모델링하면 더 좋은 결과를 얻을 수 있습니다. 두 캠 모두에서 플랫 서피스를 제거해야 합니다.
• 정확하고 신뢰할 수 있는 동작을 위해서는 2D 캠이 포함된 작업 평면이 항상 평행 상태를 유지해야 합니다. 밀어내기 방향을 평행하게 유지하려면 캠 바디 사이에 구속이나 추가 연결을 정의합니다.