Física
El controlador PID aplica la corrección a una variable de control  mediante la evaluación de la diferencia
mediante la evaluación de la diferencia  entre la variable de proceso medida (PV) y el punto de ajuste deseado (SP). Una combinación de términos proporcional (P), integral (I) y derivada (D) juntos se denomina controlador PID. Estos tres términos de control se varían juntos o en combinación de dos en función de la aplicación para obtener una respuesta precisa y óptima. El flujo de trabajo típico del controlador PID se muestra en la siguiente figura.
entre la variable de proceso medida (PV) y el punto de ajuste deseado (SP). Una combinación de términos proporcional (P), integral (I) y derivada (D) juntos se denomina controlador PID. Estos tres términos de control se varían juntos o en combinación de dos en función de la aplicación para obtener una respuesta precisa y óptima. El flujo de trabajo típico del controlador PID se muestra en la siguiente figura.
mediante la evaluación de la diferencia entre la variable de proceso medida (PV) y el punto de ajuste deseado (SP). Una combinación de términos proporcional (P), integral (I) y derivada (D) juntos se denomina controlador PID. Estos tres términos de control se varían juntos o en combinación de dos en función de la aplicación para obtener una respuesta precisa y óptima. El flujo de trabajo típico del controlador PID se muestra en la siguiente figura.Diagrama de bloques del controlador PID
Origen: Wikipedia

La función que gobierna la variable de control existe en los formatos Paralelo (ideal) y Estándar. La forma Paralela (Ideal) de la función de control es

donde,
= Variable de control = Error entre la variable de proceso (PV) y el punto de ajuste (SP) = Coeficiente para el término proporcional (ganancia proporcional)
= Coeficiente para el término proporcional (ganancia proporcional) = Coeficiente para el término integral (ganancia integral)
= Coeficiente para el término integral (ganancia integral) = Coeficiente para el término del derivado (ganancia derivada)
= Coeficiente para el término del derivado (ganancia derivada)La forma estándar de la función de control es

donde,
= Coeficiente para el término proporcional (ganancia proporcional) = Tiempo integral, la muestra de tiempo en la que el controlador I intenta eliminar el error por completo
= Tiempo integral, la muestra de tiempo en la que el controlador I intenta eliminar el error por completo = Tiempo derivado, el tiempo en el que el término derivado intenta predecir el error futuro
= Tiempo derivado, el tiempo en el que el término derivado intenta predecir el error futuroEl comportamiento de los tres términos de control de PID son los siguientes:
Término proporcional (controlador P)
El controlador P proporciona una salida que es proporcional al valor actual de error (SP - PV). El error resultante entre el punto de ajuste (SP) y la variable de proceso (PV) se multiplica por una constante proporcional () para obtener la salida. La velocidad de la respuesta de salida depende de la ganancia proporcional (). Un valor superior de resultados () provoca un gran cambio en la salida de un valor de error determinado y puede hacer que el sistema sea inestable. Por el contrario, un valor menor de resultados () hace que el sistema sea menos receptivo para un cambio determinado en el error y a cualquier fluctuación del sistema. El controlador P siempre funciona con un error en régimen permanente, ya que está completamente gobernado por un valor de error distinto de cero. El punto de ajuste no se puede lograr con el controlador P, ya que la corrección aplicada se aproxima a cero y el error se acerca a cero. En general, las prácticas industriales sugieren que el término proporcional debe contribuir con la mayor parte de la respuesta de producción.
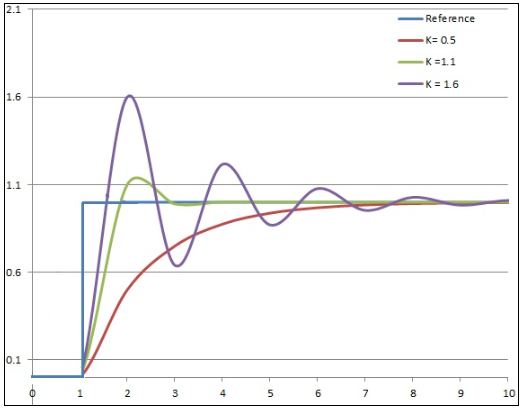
) para obtener la salida. La velocidad de la respuesta de salida depende de la ganancia proporcional (). Un valor superior de resultados () provoca un gran cambio en la salida de un valor de error determinado y puede hacer que el sistema sea inestable. Por el contrario, un valor menor de resultados () hace que el sistema sea menos receptivo para un cambio determinado en el error y a cualquier fluctuación del sistema. El controlador P siempre funciona con un error en régimen permanente, ya que está completamente gobernado por un valor de error distinto de cero. El punto de ajuste no se puede lograr con el controlador P, ya que la corrección aplicada se aproxima a cero y el error se acerca a cero. En general, las prácticas industriales sugieren que el término proporcional debe contribuir con la mayor parte de la respuesta de producción.En la siguiente imagen se muestra la respuesta de un sistema a la ganancia proporcional (). Se puede ver que con el aumento de los resultados (), la variable de proceso sobrepasa el punto de ajuste y comienza a oscilar.
). Se puede ver que con el aumento de los resultados (), la variable de proceso sobrepasa el punto de ajuste y comienza a oscilar.Respuesta de PV al cambio de paso de SP con el tiempo. () y () se mantienen constantes
) y () se mantienen constantesOrigen: Wikipedia
Término integral (I - Controlador)
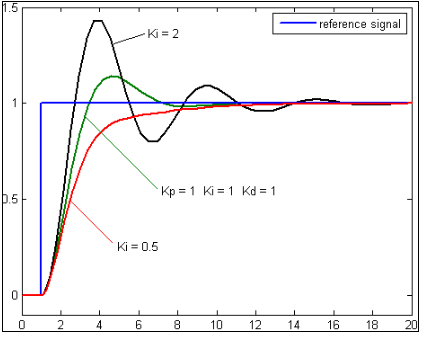
El término integral tiene en cuenta los valores de error anteriores y los integra durante un período de tiempo, hasta que el error llega a cero. El controlador I considera cuánto tiempo y qué tan lejos está la variable de proceso del punto de ajuste, a diferencia del controlador P que solo considera qué tan lejos está del punto de ajuste. El controlador I busca eliminar el error residual después de la aplicación del controlador P agregando una ganancia () al valor acumulado del error. El controlador I se utiliza principalmente para reducir el error en régimen permanente en el sistema. Para muchas aplicaciones, los controladores P-I están combinados y son suficientes para obtener una buena respuesta, acelerando hasta el punto de ajuste con el controlador P y eliminando el error en régimen permanente con el controlador I. Sin embargo, en el proceso de llevar el error acumulado a cero, el controlador I a veces puede sobrepasar la respuesta de salida, como se muestra en el siguiente mensaje.
) al valor acumulado del error. El controlador I se utiliza principalmente para reducir el error en régimen permanente en el sistema. Para muchas aplicaciones, los controladores P-I están combinados y son suficientes para obtener una buena respuesta, acelerando hasta el punto de ajuste con el controlador P y eliminando el error en régimen permanente con el controlador I. Sin embargo, en el proceso de llevar el error acumulado a cero, el controlador I a veces puede sobrepasar la respuesta de salida, como se muestra en el siguiente mensaje.Respuesta de PV al cambio de paso de SP con el tiempo. () y () se mantienen constantes
) y () se mantienen constantesOrigen: Wikipedia
Término derivado (controlador D)
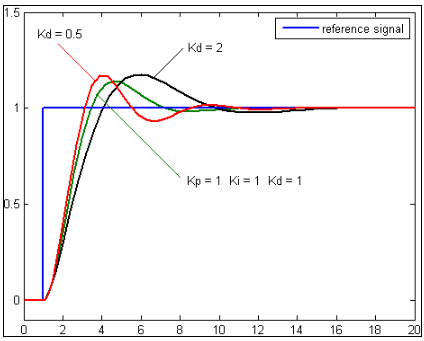
El término derivado determina la pendiente del error a lo largo del tiempo y lo multiplica por una ganancia derivada (). El controlador D prevé el comportamiento futuro del error en función de la tasa de cambio actual y acelera la respuesta de salida del sistema. Si el cambio es alto o la pendiente varía continuamente, se requiere un efecto de amortiguación alto para controlar el cambio. El controlador D mueve el dispositivo de control en una dirección para contrarrestar el cambio repentino de la variable de proceso. Un controlador D puro no puede llevar el error a cero, ya que solo considera la tasa de cambio del error. Solo intenta llevar la velocidad de cambio a cero mediante la amortiguación y, por lo tanto, la reducción del rebasamiento de la respuesta de salida, como se muestra en la siguiente figura.
). El controlador D prevé el comportamiento futuro del error en función de la tasa de cambio actual y acelera la respuesta de salida del sistema. Si el cambio es alto o la pendiente varía continuamente, se requiere un efecto de amortiguación alto para controlar el cambio. El controlador D mueve el dispositivo de control en una dirección para contrarrestar el cambio repentino de la variable de proceso. Un controlador D puro no puede llevar el error a cero, ya que solo considera la tasa de cambio del error. Solo intenta llevar la velocidad de cambio a cero mediante la amortiguación y, por lo tanto, la reducción del rebasamiento de la respuesta de salida, como se muestra en la siguiente figura.Respuesta de PV al cambio de paso de SP con el tiempo. () y () se mantienen constantes
) y () se mantienen constantesOrigen: Wikipedia