Физика
ПИД-регулятор применяет коррекцию к управляющей переменной  , оценивая разницу
, оценивая разницу  между измеряемой переменной процесса (PV) и требуемой заданным значением (SP). Комбинацию пропорционального (П), интегрального (И) и дифференциального (Д) контроллеров называют ПИД-регулятором. Эти управления меняются совместно или попарно в зависимости от применения для получения точного и оптимального отклика. Типовой рабочий процесс ПИД-регулятора показан на следующем рисунке.
между измеряемой переменной процесса (PV) и требуемой заданным значением (SP). Комбинацию пропорционального (П), интегрального (И) и дифференциального (Д) контроллеров называют ПИД-регулятором. Эти управления меняются совместно или попарно в зависимости от применения для получения точного и оптимального отклика. Типовой рабочий процесс ПИД-регулятора показан на следующем рисунке.
, оценивая разницу между измеряемой переменной процесса (PV) и требуемой заданным значением (SP). Комбинацию пропорционального (П), интегрального (И) и дифференциального (Д) контроллеров называют ПИД-регулятором. Эти управления меняются совместно или попарно в зависимости от применения для получения точного и оптимального отклика. Типовой рабочий процесс ПИД-регулятора показан на следующем рисунке.Блок-схема ПИД-регулятора
Источник: Википедия

Функция, которая управляет управляющей переменной, существует в параллельной (идеальной) и стандартной формах. Параллельная (идеальная) форма управляющей функции имеет вид

где
= управляющая переменная = ошибка между технологической переменной (PV) и заданным значением (SP) = коэффициент для интегрального члена (интегральное усиление)
= коэффициент для интегрального члена (интегральное усиление) = коэффициент для интегрального члена (интегральное усиление)
= коэффициент для интегрального члена (интегральное усиление) = коэффициент для дифференциального члена (дифференциальное усиление)
= коэффициент для дифференциального члена (дифференциальное усиление)Стандартная форма управляющей функции имеет вид

где
= коэффициент для интегрального члена (интегральное усиление) = интегральное время, временная выборка, в которой I-контроллер пытается полностью устранить ошибку
= интегральное время, временная выборка, в которой I-контроллер пытается полностью устранить ошибку = дифференциальное время, т. е. время, в которое дифференциальный член пытается предсказать будущую ошибку
= дифференциальное время, т. е. время, в которое дифференциальный член пытается предсказать будущую ошибкуПоведение трех управляющих членов ПИД:
Пропорциональный член (П-контроллер)
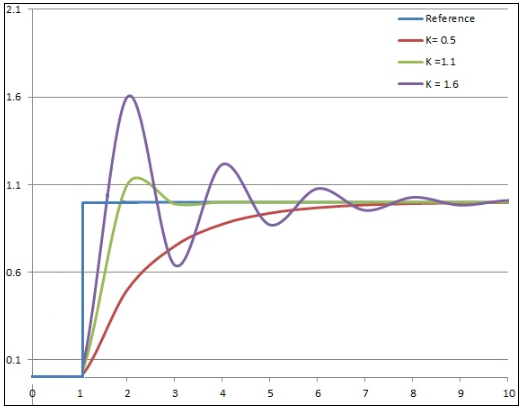
П-контроллер обеспечивает выходные данные, пропорциональные текущему значению погрешности (SP - PV). Чтобы получить выходные данные, погрешность между заданным значением (SP) и технологической переменной (PV) умножается на пропорциональную константу (). Скорость выходного отклика зависит от пропорционального усиления (). Большее значение () приводит к значительному изменению выходных данных для данного значения ошибки и может сделать систему нестабильной. Напротив, чем меньше значение (), тем хуже реагирует система на данное изменение ошибки и на любые флуктуации в системе. Р-контроллер всегда работает с погрешностью установившегося состояния, так как полностью управляется ненулевым значением погрешности. Заданное значение невозможно получить с помощью П-контроллера, так как примененная коррекция приближается к нулю с ошибкой, приближающейся к нулю. В целом промышленная практика показывает, что пропорциональный член должен составлять основную часть отклика на выходе.
). Скорость выходного отклика зависит от пропорционального усиления (). Большее значение () приводит к значительному изменению выходных данных для данного значения ошибки и может сделать систему нестабильной. Напротив, чем меньше значение (), тем хуже реагирует система на данное изменение ошибки и на любые флуктуации в системе. Р-контроллер всегда работает с погрешностью установившегося состояния, так как полностью управляется ненулевым значением погрешности. Заданное значение невозможно получить с помощью П-контроллера, так как примененная коррекция приближается к нулю с ошибкой, приближающейся к нулю. В целом промышленная практика показывает, что пропорциональный член должен составлять основную часть отклика на выходе.Отклик системы на пропорциональное усиление () показан на следующем рисунке. Как можно видеть при увеличении (), технологическая переменная (PV) выходит за пределы заданного значения (SP) и начинает колебаться.
) показан на следующем рисунке. Как можно видеть при увеличении (), технологическая переменная (PV) выходит за пределы заданного значения (SP) и начинает колебаться.Реакция PV на ступенчатое изменение SP во времени. () и () остаются постоянными
) и () остаются постояннымиИсточник: Википедия
Интегральный член (И-контроллер)
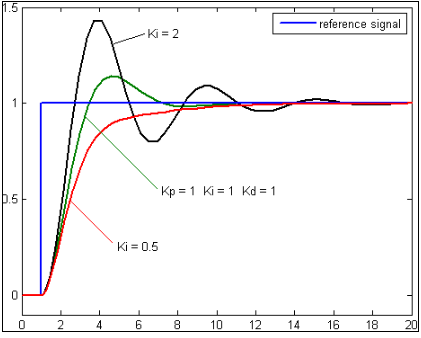
Интегральный член учитывает прошлые значения ошибки и интегрирует их за определенный период времени, пока ошибка не доходит до нуля. И-контроллер учитывает, как долго и как далеко переменная процесса находится от заданного значения, в отличие от П-контроллера, который учитывает только отличие от заданного значения. И-контроллер стремится устранить остаточную погрешность после применения П-контроллера, добавляя усиление () к кумулятивному значению ошибки. И-контроллер в первую очередь используется для уменьшения ошибок установившегося состояния в системе. Во многих случаях П-И-контроллеры комбинируются и достаточны для получения хорошего отклика, ускоряясь до заданного значения с помощью П-контроллера и устраняя ошибку установившегося состояния с И-контроллером. Однако в процессе приведения кумулятивной ошибки к нулю И-контроллер иногда может превысить выходной отклик, как показано в следующем сообщении.
) к кумулятивному значению ошибки. И-контроллер в первую очередь используется для уменьшения ошибок установившегося состояния в системе. Во многих случаях П-И-контроллеры комбинируются и достаточны для получения хорошего отклика, ускоряясь до заданного значения с помощью П-контроллера и устраняя ошибку установившегося состояния с И-контроллером. Однако в процессе приведения кумулятивной ошибки к нулю И-контроллер иногда может превысить выходной отклик, как показано в следующем сообщении.Реакция PV на ступенчатое изменение SP во времени. () и () остаются постоянными
) и () остаются постояннымиИсточник: Википедия
Дифференциальный член (Д-контроллер)
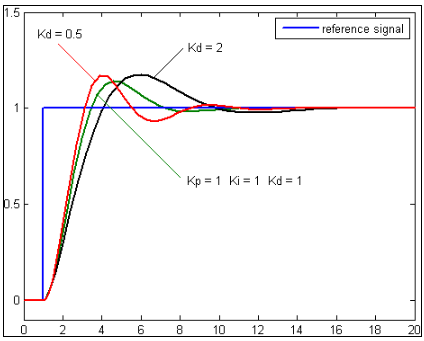
Дифференциальный член определяет наклон кривой ошибки во времени и умножает его на дифференциальный коэф. усиления (). Д-контроллер предсказывает будущее поведение ошибки в зависимости от текущей скорости изменения и связывает выходной отклик системы. Если изменение велико или наклон постоянно изменяется, для управления этим изменением требуется высокий эффект демпфирования. Д-контроллер перемещает управляющее устройство в таком направлении, чтобы противодействовать внезапному изменению переменной процесса. Чистый Д-контроллер не может свести погрешность к нулю, так как он учитывает только скорость изменения ошибки. Он только пытается довести скорость изменения до нуля путем демпфирования и тем самым уменьшения отклонения отклика выходных данных, как показано на следующем рисунке.
). Д-контроллер предсказывает будущее поведение ошибки в зависимости от текущей скорости изменения и связывает выходной отклик системы. Если изменение велико или наклон постоянно изменяется, для управления этим изменением требуется высокий эффект демпфирования. Д-контроллер перемещает управляющее устройство в таком направлении, чтобы противодействовать внезапному изменению переменной процесса. Чистый Д-контроллер не может свести погрешность к нулю, так как он учитывает только скорость изменения ошибки. Он только пытается довести скорость изменения до нуля путем демпфирования и тем самым уменьшения отклонения отклика выходных данных, как показано на следующем рисунке.Реакция PV на ступенчатое изменение SP во времени. () и () остаются постоянными
) и () остаются постояннымиИсточник: Википедия