Física
O controlador PID aplica correção a uma variável de controle  avaliando a diferença
avaliando a diferença  entre a variável de processo medida (PV) e o ponto de ajuste desejado (SP). A combinação dos termos proporcional (P), integral (I) e derivativo (D) juntos é chamada de controlador PID. Esses três termos de controle são variados juntos ou em uma combinação de dois com base na aplicação para obter uma resposta precisa e ideal. O fluxo de trabalho típico do controlador PID é exibido na figura a seguir.
entre a variável de processo medida (PV) e o ponto de ajuste desejado (SP). A combinação dos termos proporcional (P), integral (I) e derivativo (D) juntos é chamada de controlador PID. Esses três termos de controle são variados juntos ou em uma combinação de dois com base na aplicação para obter uma resposta precisa e ideal. O fluxo de trabalho típico do controlador PID é exibido na figura a seguir.
avaliando a diferença entre a variável de processo medida (PV) e o ponto de ajuste desejado (SP). A combinação dos termos proporcional (P), integral (I) e derivativo (D) juntos é chamada de controlador PID. Esses três termos de controle são variados juntos ou em uma combinação de dois com base na aplicação para obter uma resposta precisa e ideal. O fluxo de trabalho típico do controlador PID é exibido na figura a seguir.Diagrama de blocos do controlador PID
Fonte: Wikipédia

A função que controla a variável de controle existe nas formas paralela (ideal) e padrão. A forma paralela (ideal) da função de controle é

em que
= Variável de controle = Erro entre a variável de processo (PV) e o ponto de ajuste (SP) = Coeficiente para o termo proporcional (Ganho proporcional)
= Coeficiente para o termo proporcional (Ganho proporcional) = Coeficiente para o termo integral (Ganho integral)
= Coeficiente para o termo integral (Ganho integral) = Coeficiente para o termo do derivativo (Ganho derivativo)
= Coeficiente para o termo do derivativo (Ganho derivativo)A forma padrão da função de controle é

em que
= Coeficiente para o termo proporcional (Ganho proporcional) = Tempo integral, a amostra de tempo na qual o controlador-I tenta eliminar o erro completamente
= Tempo integral, a amostra de tempo na qual o controlador-I tenta eliminar o erro completamente = Tempo derivativo, o tempo no qual o termo derivativo tenta prever o erro futuro
= Tempo derivativo, o tempo no qual o termo derivativo tenta prever o erro futuroO comportamento dos três termos de controle PID são:
Termo proporcional (Controlador-P)
O controlador-P fornece uma saída proporcional ao valor atual do erro (SP - PV). O erro resultante entre o ponto de ajuste (SP) e a variável de processo (PV) é multiplicado por uma constante proporcional () para obter a saída. A velocidade da resposta de saída depende do ganho proporcional (). Um valor maior de () resulta em uma grande mudança na saída para determinado valor de erro e pode tornar o sistema instável. Por outro lado, um valor menor de () torna o sistema menos responsivo para determinada mudança no erro e para quaisquer flutuações no sistema. O controlador-P sempre opera com um erro de estado estável, pois ele é completamente guiado por um valor de erro diferente de zero. O ponto de ajuste não pode ser alcançado com o controlador-P, pois a correção aplicada aproxima-se a zero com o erro aproximando-se a zero. Em geral, as práticas industriais sugerem que o termo proporcional deve contribuir com a maior parte da resposta de saída.
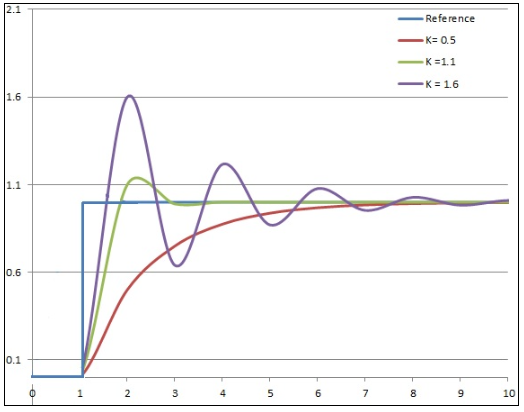
) para obter a saída. A velocidade da resposta de saída depende do ganho proporcional (). Um valor maior de () resulta em uma grande mudança na saída para determinado valor de erro e pode tornar o sistema instável. Por outro lado, um valor menor de () torna o sistema menos responsivo para determinada mudança no erro e para quaisquer flutuações no sistema. O controlador-P sempre opera com um erro de estado estável, pois ele é completamente guiado por um valor de erro diferente de zero. O ponto de ajuste não pode ser alcançado com o controlador-P, pois a correção aplicada aproxima-se a zero com o erro aproximando-se a zero. Em geral, as práticas industriais sugerem que o termo proporcional deve contribuir com a maior parte da resposta de saída.A resposta do sistema para o ganho proporcional () é exibida na imagem a seguir. É possível ver que, com o aumento em (), a variável de processo ultrapassa o ponto de ajuste e começa a oscilar.
) é exibida na imagem a seguir. É possível ver que, com o aumento em (), a variável de processo ultrapassa o ponto de ajuste e começa a oscilar.Resposta de PV para a mudança do passo de SP ao longo do tempo. () e () são mantidas constantes
) e () são mantidas constantesFonte: Wikipédia
Termo Integral (Controlador-I)
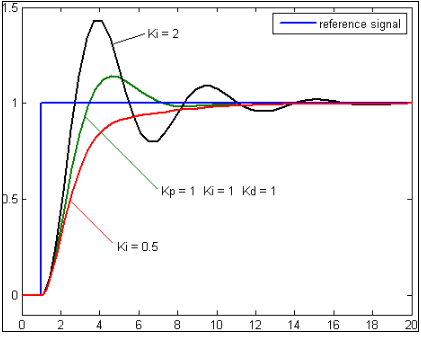
O termo integral considera os valores de erro passados e integra-os ao longo de um período de tempo, até que o erro seja zero. O controlador-I considera o tempo e a distância da variável de processo com relação ao ponto de ajuste, ao contrário do controlador-P, que considera somente a distância. O controlador-I procura eliminar o erro residual após a aplicação do controlador-P, adicionando um ganho () ao valor cumulativo de erro. O controlador-I é usado principalmente para reduzir o erro de estado estável no sistema. Para muitas aplicações, os controladores P e I são combinados e suficientes para obter uma boa resposta, acelerando até o ponto de ajuste com o controlador-P e eliminando o erro de estado estável com o controlador-I. No entanto, no processo de aproximar o erro cumulativo a zero, o controlador-I, às vezes, pode exceder a resposta de saída, conforme exibido na mensagem a seguir.
) ao valor cumulativo de erro. O controlador-I é usado principalmente para reduzir o erro de estado estável no sistema. Para muitas aplicações, os controladores P e I são combinados e suficientes para obter uma boa resposta, acelerando até o ponto de ajuste com o controlador-P e eliminando o erro de estado estável com o controlador-I. No entanto, no processo de aproximar o erro cumulativo a zero, o controlador-I, às vezes, pode exceder a resposta de saída, conforme exibido na mensagem a seguir.Resposta de PV para a mudança do passo de SP ao longo do tempo. () e () são mantidas constantes
) e () são mantidas constantesFonte: Wikipédia
Termo derivativo (Controlador-D)
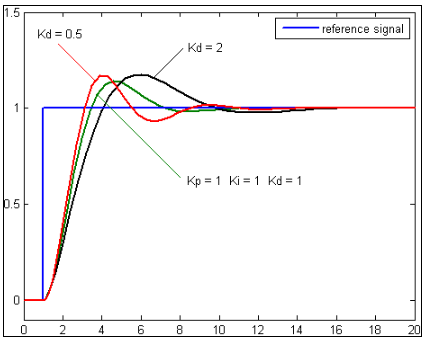
O termo derivativo determina a inclinação do erro ao longo do tempo e multiplica-o por um ganho derivativo (). O controlador-D antecipa o comportamento futuro do erro com base na taxa de mudança atual e assegura a resposta de saída do sistema. Se a mudança é alta ou se a inclinação varia continuamente, é requerido um efeito de amortecimento alto para controlar a mudança. O controlador-D move o dispositivo de controle em uma direção para neutralizar a mudança repentina da variável de processo. Um controlador-D puro não pode aproximar o erro a zero, pois considera somente a taxa de mudança do erro. Ele tenta somente aproximar a taxa de mudança a zero por meio de amortecimento, reduzindo a sobrecarga da resposta de saída, conforme exibido na figura a seguir.
). O controlador-D antecipa o comportamento futuro do erro com base na taxa de mudança atual e assegura a resposta de saída do sistema. Se a mudança é alta ou se a inclinação varia continuamente, é requerido um efeito de amortecimento alto para controlar a mudança. O controlador-D move o dispositivo de controle em uma direção para neutralizar a mudança repentina da variável de processo. Um controlador-D puro não pode aproximar o erro a zero, pois considera somente a taxa de mudança do erro. Ele tenta somente aproximar a taxa de mudança a zero por meio de amortecimento, reduzindo a sobrecarga da resposta de saída, conforme exibido na figura a seguir.Resposta de PV para a mudança do passo de SP ao longo do tempo. () e () são mantidas constantes
) e () são mantidas constantesFonte: Wikipédia