Movimentos de um corpo rígido
Em simulações, as superfícies de um objeto sólido são, geralmente, limites de parede em um domínio de fluxo. Quando um objeto ou superfície sólida é submetida a forças dinâmicas e mecânicas e efeito térmico, o desequilíbrio das forças efetivas pode fazer com que o corpo se mova e deforme. Um objeto sólido, geralmente, é considerado como um corpo rígido em simulações de fluxo. Portanto, para um objeto sólido submetido a desequilíbrios de força, pressupõe-se que ele possa mover-se linearmente (translação), angularmente (rotação) ou linear e angularmente, sem deformação. Para um domínio computacional do CFA, entretanto, o movimento do limite pode levar à mudança do domínio e, consequentemente, a malha de volume pode sofrer deformação, conforme descrito no módulo Fluxo.
Para um corpo rígido, as equações que controlam seus movimentos são derivadas diretamente da conservação do momento linear e angular:
• Momento linear (Translação)
Equação 2.426
• Momento angular (Rotação)
Equação 2.427
Na equação 2.426,  é a massa do objeto móvel,
é a massa do objeto móvel,  ⃗ é a velocidade linear/de transição e
⃗ é a velocidade linear/de transição e  ⃗ são as forças total/efetiva exercidas no corpo durante a translação. Na equação 2.427,
⃗ são as forças total/efetiva exercidas no corpo durante a translação. Na equação 2.427,  é o momento de inércia,
é o momento de inércia,  ⃗ é a velocidade angular e
⃗ é a velocidade angular e  ⃗ é o torque total/efetivo aplicado ao corpo em rotação.
⃗ é o torque total/efetivo aplicado ao corpo em rotação.
é a massa do objeto móvel, ⃗ é a velocidade linear/de transição e ⃗ são as forças total/efetiva exercidas no corpo durante a translação. Na equação 2.427, é o momento de inércia, ⃗ é a velocidade angular e ⃗ é o torque total/efetivo aplicado ao corpo em rotação.Aequação 2.426 e equação 2.427 controlam os movimentos gerais de um corpo sólido, que tem seis graus de liberdade (6-GDL), com três graus cada para translação (3-GDL) e rotação (3-GDL), respectivamente. O Creo Flow Analysis considera somente a translação e a rotação de 1-GDL, que são explicadas nesta seção.
Translação de 1-GDL
Partindo do pressuposto de que um corpo sólido move-se linearmente em uma direção especificada de forma arbitrária (permanece inalterada), definida por um vetor de unidade  , o movimento translacional do corpo é reduzido para um grau de liberdade (1-GDL). Como resultado, para a conservação de momento linear, a equação 2.426 torna-se uma equação escalar ao longo da direção de movimento, uma vez que a velocidade e força de movimento são expressas em função de
, o movimento translacional do corpo é reduzido para um grau de liberdade (1-GDL). Como resultado, para a conservação de momento linear, a equação 2.426 torna-se uma equação escalar ao longo da direção de movimento, uma vez que a velocidade e força de movimento são expressas em função de  :
:
, o movimento translacional do corpo é reduzido para um grau de liberdade (1-GDL). Como resultado, para a conservação de momento linear, a equação 2.426 torna-se uma equação escalar ao longo da direção de movimento, uma vez que a velocidade e força de movimento são expressas em função de :
Equação 2.428

Equação 2.429
Equação 2.430
em que  é a magnitude do vetor de posição
é a magnitude do vetor de posição  em um ponto de interesse no corpo sólido ao longo da direção de movimento
em um ponto de interesse no corpo sólido ao longo da direção de movimento  . Em um sistema de coordenadas cartesiano, temos
. Em um sistema de coordenadas cartesiano, temos
é a magnitude do vetor de posição em um ponto de interesse no corpo sólido ao longo da direção de movimento . Em um sistema de coordenadas cartesiano, temos
Equação 2.431
Se a massa do corpo sólido permanece constante e o termo de força é expandido para incluir explicitamente todas as forças aplicadas no corpo, teremos a equação escalar de momento linear da seguinte forma:

Equação 2.432
As forças do lado direito indicam o seguinte:
• Força hidrodinâmica  — Consiste em pressão e forças de cisalhamento. Elas são causadas pelo movimento relativo entre o fluxo de fluido e as superfícies do corpo sólido que estão em contato com o fluxo. A pressão e as forças de cisalhamento são obtidas a partir das soluções de fluxo (quantidades de saída):
— Consiste em pressão e forças de cisalhamento. Elas são causadas pelo movimento relativo entre o fluxo de fluido e as superfícies do corpo sólido que estão em contato com o fluxo. A pressão e as forças de cisalhamento são obtidas a partir das soluções de fluxo (quantidades de saída):
— Consiste em pressão e forças de cisalhamento. Elas são causadas pelo movimento relativo entre o fluxo de fluido e as superfícies do corpo sólido que estão em contato com o fluxo. A pressão e as forças de cisalhamento são obtidas a partir das soluções de fluxo (quantidades de saída):
Equação 2.433
• Força de amortecimento  — Força de retardo causada pelo efeito de amortecimento do atrito. Ela é determinada pelo movimento do objeto sólido e o coeficiente de amortecimento definido pelo usuário,
— Força de retardo causada pelo efeito de amortecimento do atrito. Ela é determinada pelo movimento do objeto sólido e o coeficiente de amortecimento definido pelo usuário,  :
:
— Força de retardo causada pelo efeito de amortecimento do atrito. Ela é determinada pelo movimento do objeto sólido e o coeficiente de amortecimento definido pelo usuário, :
Equação 2.434
• Força da mola  — Depende do deslocamento da mola,
— Depende do deslocamento da mola,  , da constante de mola,
, da constante de mola,  , e da força de pré-carga da mola,
, e da força de pré-carga da mola,  :
:
— Depende do deslocamento da mola, , da constante de mola, , e da força de pré-carga da mola, :
Equação 2.435
em que o deslocamento da mola  é definido da seguinte forma:
é definido da seguinte forma:
é definido da seguinte forma:
Equação 2.436
em que  é a magnitude do vetor de posição
é a magnitude do vetor de posição  no local anterior
no local anterior  .
.
é a magnitude do vetor de posição no local anterior .• Força de atrito — O modelo de atrito de contato é adotado para levar em conta o efeito do atrito em um sistema dinâmico. A força de atrito  é modelada da seguinte forma:
é modelada da seguinte forma:
é modelada da seguinte forma:
Equação 2.437
em que  é o componente normal da força de contato exercida sobre a superfície sólida de interesse. Para o coeficiente de atrito
é o componente normal da força de contato exercida sobre a superfície sólida de interesse. Para o coeficiente de atrito  , o coeficiente de atrito estático
, o coeficiente de atrito estático  e o coeficiente de atrito de deslizamento
e o coeficiente de atrito de deslizamento  são introduzidos para os corpos estacionários e móveis, respectivamente:
são introduzidos para os corpos estacionários e móveis, respectivamente:
é o componente normal da força de contato exercida sobre a superfície sólida de interesse. Para o coeficiente de atrito , o coeficiente de atrito estático e o coeficiente de atrito de deslizamento são introduzidos para os corpos estacionários e móveis, respectivamente:
Equação 2.438
• Força adicional  — Incluída para forças adicionais especificadas pelo usuário.
— Incluída para forças adicionais especificadas pelo usuário.
— Incluída para forças adicionais especificadas pelo usuário.Rotação de 1-GDL
Quando um eixo de rotação arbitrário é definido por um ponto (centro do eixo)  e pelo vetor de unidade direcional
e pelo vetor de unidade direcional  , a rotação do corpo sólido em torno do eixo,
, a rotação do corpo sólido em torno do eixo,  , também é reduzida para rotação de 1 GDL. Da mesma forma, para a conservação do momento angular, a equação 2.427 também se torna uma equação escalar ao longo da direção tangencial
, também é reduzida para rotação de 1 GDL. Da mesma forma, para a conservação do momento angular, a equação 2.427 também se torna uma equação escalar ao longo da direção tangencial  , definida da seguinte forma:
, definida da seguinte forma:
e pelo vetor de unidade direcional , a rotação do corpo sólido em torno do eixo, , também é reduzida para rotação de 1 GDL. Da mesma forma, para a conservação do momento angular, a equação 2.427 também se torna uma equação escalar ao longo da direção tangencial , definida da seguinte forma:
Equação 2.439
em que  é o vetor que aponta do centro do eixo para um ponto arbitrário
é o vetor que aponta do centro do eixo para um ponto arbitrário  no corpo sólido:
no corpo sólido:
é o vetor que aponta do centro do eixo para um ponto arbitrário no corpo sólido:
Equação 2.440
A velocidade angular e o torque no ponto  são reescritos da seguinte forma:
são reescritos da seguinte forma:
são reescritos da seguinte forma:
Equação 2.441

Equação 2.442

Equação 2.443
em que  é o ângulo de rotação do ponto
é o ângulo de rotação do ponto  relativo ao local inicial ou de referência.
relativo ao local inicial ou de referência.
é o ângulo de rotação do ponto relativo ao local inicial ou de referência.Se o momento de inércia permanece constante e o termo de torque é expandido para incluir explicitamente todos os torques aplicados no corpo em rotação, teremos a equação escalar de momento angular da seguinte forma:

Equação 2.444
Os termos de torque do lado direito são definidos da seguinte forma:
• Torque hidrodinâmico  — Combinação de torque por causa da pressão e forças de cisalhamento:
— Combinação de torque por causa da pressão e forças de cisalhamento:
— Combinação de torque por causa da pressão e forças de cisalhamento:
Equação 2.445
• Torque de amortecimento  — Depende da velocidade rotacional
— Depende da velocidade rotacional  e do coeficiente de amortecimento definido pelo usuário
e do coeficiente de amortecimento definido pelo usuário  :
:
— Depende da velocidade rotacional e do coeficiente de amortecimento definido pelo usuário :
Equação 2.446
• Torque de mola  — Torque induzido por torção que depende do ângulo de deslocamento,
— Torque induzido por torção que depende do ângulo de deslocamento,  , do torque de pré-carga definido pelo usuário,
, do torque de pré-carga definido pelo usuário,  , e da constante torção,
, e da constante torção,  .
.
— Torque induzido por torção que depende do ângulo de deslocamento, , do torque de pré-carga definido pelo usuário, , e da constante torção, .
Equação 2.447
em que  é o ângulo de referência. Normalmente, é a posição do limite ou volume durante a configuração do modelo, mas pode corresponder a um local diferente. Por exemplo, no deslocamento angular zero, o ângulo de referência,
é o ângulo de referência. Normalmente, é a posição do limite ou volume durante a configuração do modelo, mas pode corresponder a um local diferente. Por exemplo, no deslocamento angular zero, o ângulo de referência,  , não é o mesmo que a posição angular inicial.
, não é o mesmo que a posição angular inicial.
é o ângulo de referência. Normalmente, é a posição do limite ou volume durante a configuração do modelo, mas pode corresponder a um local diferente. Por exemplo, no deslocamento angular zero, o ângulo de referência, , não é o mesmo que a posição angular inicial.• Torque de atrito — Torque causado pela força de atrito que ocorre quando dois objetos em contato movem-se. Em experimentos, é determinado pela diferença entre o torque aplicado e o observado ou o torque efetivo. Depende do coeficiente de atrito  e do torque de contato causado pela força normal
e do torque de contato causado pela força normal  aplicada na superfície de contato:
aplicada na superfície de contato:
e do torque de contato causado pela força normal aplicada na superfície de contato:
Equação 2.448
em que  é um parâmetro definido pelo usuário na equação 2.438.
é um parâmetro definido pelo usuário na equação 2.438.
é um parâmetro definido pelo usuário na equação 2.438.• Torques adicionais  — Incluídos para torques adicionais especificados pelo usuário.
— Incluídos para torques adicionais especificados pelo usuário.
— Incluídos para torques adicionais especificados pelo usuário.Modelo de reflexo
Em muitas situações, o corpo sólido somente translada ou somente rotaciona, ou translada e rotaciona em um espaço limitado (distância ou ângulo limitado), ou seja, ele tem uma posição máxima ou mínima, ou máxima e mínima. Por exemplo, conforme exibido na figura a seguir, quando um pêndulo simples é liberado de sua posição original com o ângulo  , a força de restauração que atua em sua massa faz com que ele oscile em torno da posição de equilíbrio. O ângulo máximo nos lados da posição da equilíbrio,
, a força de restauração que atua em sua massa faz com que ele oscile em torno da posição de equilíbrio. O ângulo máximo nos lados da posição da equilíbrio,  , depende da posição de liberação,
, depende da posição de liberação,  . Se não houver atrito (articulação sem atrito e no vácuo), o ângulo máximo permanecerá inalterado e o pêndulo balançará de um lado para outro permanentemente com as mesmas posições extremas. No entanto, quando um pêndulo está na atmosfera, por exemplo, a resistência do ar (amortecimento) faz com que o ângulo máximo do movimento reduza com o tempo e, eventualmente, o pêndulo para na posição de equilíbrio.
. Se não houver atrito (articulação sem atrito e no vácuo), o ângulo máximo permanecerá inalterado e o pêndulo balançará de um lado para outro permanentemente com as mesmas posições extremas. No entanto, quando um pêndulo está na atmosfera, por exemplo, a resistência do ar (amortecimento) faz com que o ângulo máximo do movimento reduza com o tempo e, eventualmente, o pêndulo para na posição de equilíbrio.
, a força de restauração que atua em sua massa faz com que ele oscile em torno da posição de equilíbrio. O ângulo máximo nos lados da posição da equilíbrio, , depende da posição de liberação, . Se não houver atrito (articulação sem atrito e no vácuo), o ângulo máximo permanecerá inalterado e o pêndulo balançará de um lado para outro permanentemente com as mesmas posições extremas. No entanto, quando um pêndulo está na atmosfera, por exemplo, a resistência do ar (amortecimento) faz com que o ângulo máximo do movimento reduza com o tempo e, eventualmente, o pêndulo para na posição de equilíbrio.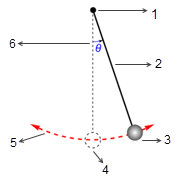
figura
1. Articulação sem atrito
2. Haste sem massa
3. Pêndulo com massa
4. Posição de equilíbrio
5. Trajetória do pêndulo
6. Amplitude
Além disso, em um ciclo (período) de balanço, quando o pêndulo atinge a posição mais alta,  , ele muda de direção com perda total de sua energia cinética. No pêndulo simples, a energia cinética é completamente transferida para a energia potencial, mas se levamos em consideração a resistência do meio, parte da energia cinética é perdida para superar o amortecimento viscoso. No entanto, a força efetiva ou a energia potencial faz com que o pêndulo comece a mover-se na direção oposta à posição de equilíbrio, em que a energia cinética (velocidade) é a máxima e a potencial é a mínima. Neste caso,
, ele muda de direção com perda total de sua energia cinética. No pêndulo simples, a energia cinética é completamente transferida para a energia potencial, mas se levamos em consideração a resistência do meio, parte da energia cinética é perdida para superar o amortecimento viscoso. No entanto, a força efetiva ou a energia potencial faz com que o pêndulo comece a mover-se na direção oposta à posição de equilíbrio, em que a energia cinética (velocidade) é a máxima e a potencial é a mínima. Neste caso,  indica uma condição sem reflexo para a equação 2.444 de momento angular de 1 GDL.
indica uma condição sem reflexo para a equação 2.444 de momento angular de 1 GDL.
, ele muda de direção com perda total de sua energia cinética. No pêndulo simples, a energia cinética é completamente transferida para a energia potencial, mas se levamos em consideração a resistência do meio, parte da energia cinética é perdida para superar o amortecimento viscoso. No entanto, a força efetiva ou a energia potencial faz com que o pêndulo comece a mover-se na direção oposta à posição de equilíbrio, em que a energia cinética (velocidade) é a máxima e a potencial é a mínima. Neste caso, indica uma condição sem reflexo para a equação 2.444 de momento angular de 1 GDL.Além da condição sem reflexo, um corpo móvel na posição de limite pode ser refletido sem perder nenhuma energia cinética (reflexo perfeito), ou perder somente uma parte de sua energia cinética (reflexo parcial). Portanto, as três condições de reflexo a seguir são aplicadas quando as equações dinâmicas de 1 GDL de translação e rotação, equação 2.432 e equação 2.444, são resolvidas para determinar os movimentos de um corpo sólido ou um limite de parede para o domínio de fluxo:
• Sem reflexo — Modelo default no Creo Flow Analysis. Modelo que determina que, quando um corpo sólido ou limite atinge o limite de seu movimento, ele muda de direção com perda total de sua energia cinética. Com  e
e  representando o reflexo e a incidência e
representando o reflexo e a incidência e  e
e  , a velocidade de translação e de rotação (somente magnitude), este modelo de reflexo é expresso da seguinte forma:
, a velocidade de translação e de rotação (somente magnitude), este modelo de reflexo é expresso da seguinte forma:
e representando o reflexo e a incidência e e , a velocidade de translação e de rotação (somente magnitude), este modelo de reflexo é expresso da seguinte forma:◦ Translação

Equação 2.449
◦ Rotação

Equação 2.450
• Reflexo parcial — Modelo que determina que, quando um corpo sólido ou limite atinge o limite de seu movimento, ele muda de direção com perda parcial de sua energia cinética, determinada por um fator especificado pelo usuário,  :
:
:◦ Translação

Equação 2.451
◦ Rotação

Equação 2.452
• Reflexo perfeito — Modelo que determina que, quando um corpo sólido ou limite atinge o limite de seu movimento, ele muda de direção com perda zero de sua energia cinética,  :
:
:◦ Translação

Equação 2.453
◦ Rotação

Equação 2.454