物理
PID コントローラは、測定されたプロセス変数 (PV) と希望の設定値 (SP) の間の差異  を評価することによって制御変数
を評価することによって制御変数  に補正を適用します。比例 (P)、積分 (I)、および微分 (D) の項を組み合わせて PID コントローラと呼びます。これら 3 つの制御項は、用途に応じて、一緒に変化させたり 2 つの組み合わせで変化させたりすることによって、正確かつ最適な応答を取得します。PID コントローラの一般的なワークフローを次の図に示します。
に補正を適用します。比例 (P)、積分 (I)、および微分 (D) の項を組み合わせて PID コントローラと呼びます。これら 3 つの制御項は、用途に応じて、一緒に変化させたり 2 つの組み合わせで変化させたりすることによって、正確かつ最適な応答を取得します。PID コントローラの一般的なワークフローを次の図に示します。
を評価することによって制御変数 に補正を適用します。比例 (P)、積分 (I)、および微分 (D) の項を組み合わせて PID コントローラと呼びます。これら 3 つの制御項は、用途に応じて、一緒に変化させたり 2 つの組み合わせで変化させたりすることによって、正確かつ最適な応答を取得します。PID コントローラの一般的なワークフローを次の図に示します。PID コントローラのブロック図
出典: Wikipedia

制御変数を制御する関数は、「平行 (理想)」(Parallel (Ideal)) フォームと「標準」(Standard) フォームで存在します。「平行 (理想)」(Parallel (Ideal)) フォームの制御関数は次のとおりです。

ここで、
= 制御変数 = プロセス変数 (PV) と設定値 (SP) の間の誤差 = 比例項の係数 (比例ゲイン)
= 比例項の係数 (比例ゲイン) = 積分項の係数 (積分ゲイン)
= 積分項の係数 (積分ゲイン) = 微分項の係数 (微分ゲイン)
= 微分項の係数 (微分ゲイン)「標準」(Standard) フォームの制御関数は次のとおりです。

ここで、
= 比例項の係数 (比例ゲイン) = 積分時間、つまり I コントローラが誤差を完全に排除しようとするサンプル時間間隔
= 積分時間、つまり I コントローラが誤差を完全に排除しようとするサンプル時間間隔 = 微分時間、つまり微分項が将来の誤差を予測しようとする時間
= 微分時間、つまり微分項が将来の誤差を予測しようとする時間PID の 3 つの制御項の挙動は次のとおりです。
比例項 (P - コントローラ)
P コントローラは、現在の誤差値 (SP - PV) に比例した出力を提供します。設定値 (SP) とプロセス変数 (PV) の間に生じる誤差を比例定数 () で乗算することによって出力が得られます。出力応答の速度は比例ゲイン () によって異なります。() の値が大きいと、所定の誤差値に対して出力の変化が大きくなり、システムが不安定になる可能性があります。逆に、() の値が小さいと、所定の誤差の変化やシステム内の変動に対してシステムの応答が遅くなります。P コントローラは、常にゼロ以外の誤差値によって駆動されるため、定常状態の誤差を残したまま動作します。誤差がゼロに近づくにつれて、適用される補正がゼロに近づくため、P コントローラでは設定値を達成できません。一般に、産業界の慣行では、比例項が出力応答の大部分を占める必要があります。
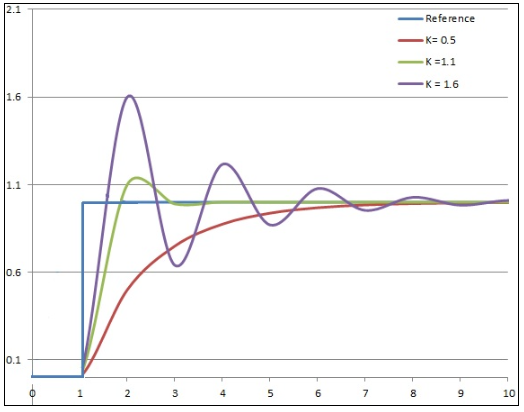
) で乗算することによって出力が得られます。出力応答の速度は比例ゲイン () によって異なります。() の値が大きいと、所定の誤差値に対して出力の変化が大きくなり、システムが不安定になる可能性があります。逆に、() の値が小さいと、所定の誤差の変化やシステム内の変動に対してシステムの応答が遅くなります。P コントローラは、常にゼロ以外の誤差値によって駆動されるため、定常状態の誤差を残したまま動作します。誤差がゼロに近づくにつれて、適用される補正がゼロに近づくため、P コントローラでは設定値を達成できません。一般に、産業界の慣行では、比例項が出力応答の大部分を占める必要があります。比例ゲイン () に対するシステムの応答を次の図に示します。() の増加に伴い、プロセス変数が設定値を超えてオーバーシュートし、振動が始まることがわかります。
) に対するシステムの応答を次の図に示します。() の増加に伴い、プロセス変数が設定値を超えてオーバーシュートし、振動が始まることがわかります。経時的な SP の段階変化に対する PV の応答。() と () は一定のまま
) と () は一定のまま出典: Wikipedia
積分項 (I - コントローラ)
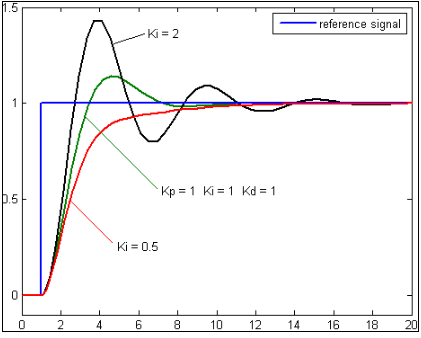
積分項は、過去の誤差値を考慮し、誤差がゼロになるまで一定期間にわたって積分します。I コントローラは、プロセス変数が設定値から離れている時間と距離を考慮します (P コントローラは設定値からの距離のみを考慮します)。I コントローラは、誤差の累積値にゲイン () を追加することにより、P コントローラの適用後の残留誤差を排除しようとします。I コントローラは、主にシステムの定常状態の誤差を低減するために使用されます。多くのアプリケーションにおいて、P コントローラと I コントローラが組み合わされ、P コントローラによって設定値への良好な応答が加速され、I コントローラによって定常状態の誤差が排除されるため、これら 2 つで十分です。ただし、次のメッセージに示すように、累積誤差をゼロにするプロセスで I コントローラが出力応答をオーバーシュートすることがあります。
) を追加することにより、P コントローラの適用後の残留誤差を排除しようとします。I コントローラは、主にシステムの定常状態の誤差を低減するために使用されます。多くのアプリケーションにおいて、P コントローラと I コントローラが組み合わされ、P コントローラによって設定値への良好な応答が加速され、I コントローラによって定常状態の誤差が排除されるため、これら 2 つで十分です。ただし、次のメッセージに示すように、累積誤差をゼロにするプロセスで I コントローラが出力応答をオーバーシュートすることがあります。経時的な SP の段階変化に対する PV の応答。() と () は一定のまま
) と () は一定のまま出典: Wikipedia
微分項 (D - コントローラ)
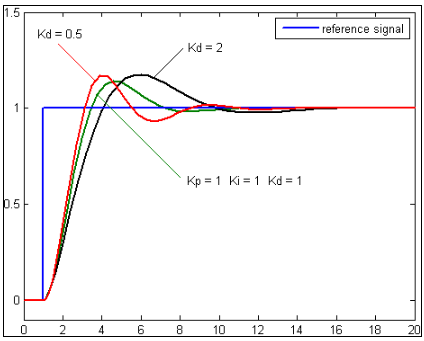
微分項は、経時的な誤差の勾配を決定し、微分ゲイン () で乗算します。D コントローラは、現在の変化率に基づいて誤差の将来の挙動を予測し、システムの出力応答を高速化します。変化が大きい場合、または勾配が連続的に変化している場合は、変化を制御するために高い減衰効果が必要です。D コントローラは、プロセス変数の急激な変化に対抗する方向に制御デバイスを移動させます。純粋な D コントローラは、誤差の変化率のみを考慮するため、誤差をゼロにすることができません。次の図に示すように、減衰して出力応答のオーバーシュートを低減させることによって変化率をゼロにしようとするだけです。
) で乗算します。D コントローラは、現在の変化率に基づいて誤差の将来の挙動を予測し、システムの出力応答を高速化します。変化が大きい場合、または勾配が連続的に変化している場合は、変化を制御するために高い減衰効果が必要です。D コントローラは、プロセス変数の急激な変化に対抗する方向に制御デバイスを移動させます。純粋な D コントローラは、誤差の変化率のみを考慮するため、誤差をゼロにすることができません。次の図に示すように、減衰して出力応答のオーバーシュートを低減させることによって変化率をゼロにしようとするだけです。経時的な SP の段階変化に対する PV の応答。() と () は一定のまま
) と () は一定のまま出典: Wikipedia