ボディ間の接触
モデル内のボディを結合するには接触を使用します。未指定ボディと開始ジオメトリの間、または 2 つの未指定ボディ間の接触を定義します。ボディは結合インタフェースによって結合され、解析中は常に互いに接触した状態を維持します。適用される荷重と拘束条件が、接続されているボディ間で転送されます。検討で定義されているすべての接触は、最終設計の生成時に考慮されます。
結合接触を作成するとき、開始ジオメトリを未指定ボディに結合するサーフェスを選択できます。これを相互作用領域と呼びます。オフセットは相互作用領域の周囲にのみ作成されます。詳細については、例: 相互作用領域を使用した接触の作成を参照してください。
接触を作成するには
1.  「接触」(Contact) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。
「接触」(Contact) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。
「接触」(Contact) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。2. [オプション] 「名前」(Name) ボックスで接触の名前を指定します。
3. モデルツリーまたはグラフィックウィンドウで 1 つ目のボディを選択します。ダイアログボックスのボディコレクターにボディが表示されます。
4. ステップ 3 を繰り返して 2 つ目のボディを選択します。
5. 必要に応じて、要素サイズの 3 倍より大きい正のオフセット値を指定します。
開始ジオメトリが参照として選択されている場合にのみオフセットを指定できます。開始形状が参照として選択されている場合はオフセットを指定できません。 オフセットを指定すると、未指定ボディの周囲の開始ジオメトリの内側に保持ジオメトリが作成されます。 |
6. 必要に応じて、開始ジオメトリを未指定ボディに結合するサーフェスを相互作用領域として選択します。
7. 「OK」をクリックします。ローリングボールオフセットは、未指定ボディまたは相互作用領域の周囲の開始ジオメトリの内側に作成されます。
選択したボディが結合インタフェースによって結合され、ジェネレーティブツリーに「接触」(Contacts) ノードが作成されます。 > ノードを展開すると、モデルに定義されているすべてのインタフェースが表示されます。
 「接続ジオメトリ」(Connected Geometry) ノードもジェネレーティブツリーに生成され、選択したボディがそのノードの下に変形可能ボディとして追加されます。
「接続ジオメトリ」(Connected Geometry) ノードもジェネレーティブツリーに生成され、選択したボディがそのノードの下に変形可能ボディとして追加されます。変形可能ボディ
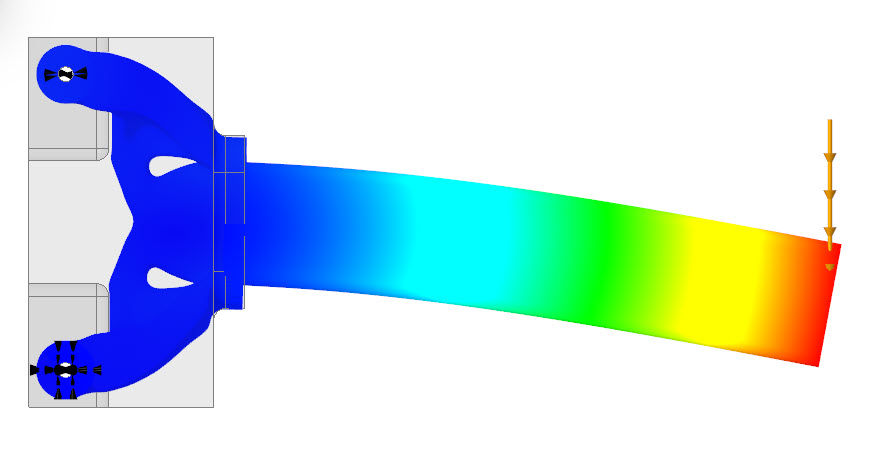
変形可能ボディ  は、最適化の際に適用荷重に基づいて変形されます。
は、最適化の際に適用荷重に基づいて変形されます。
は、最適化の際に適用荷重に基づいて変形されます。以下の図は、変形可能ボディの変位を示しています。
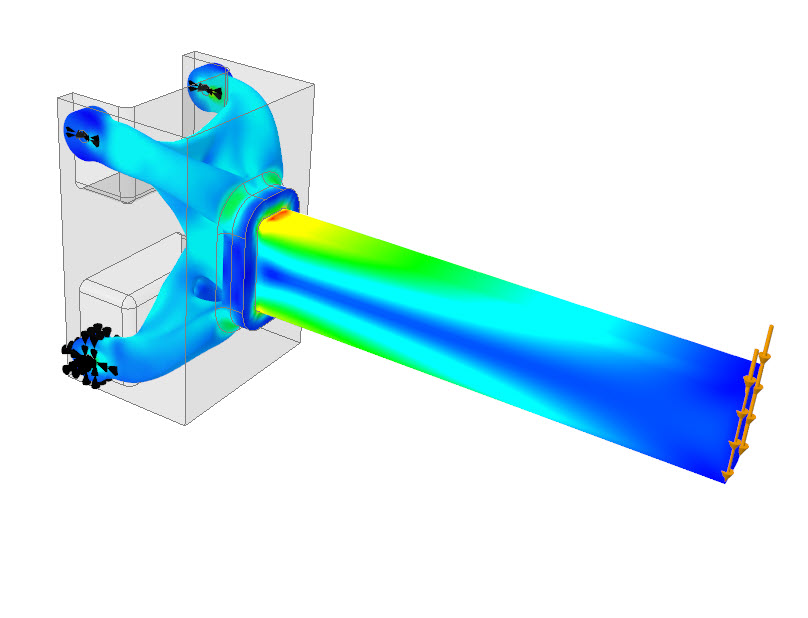
以下の図は、変形可能ボディの応力分布を示しています。
剛体
剛体  は剛性が高く、最適化の際に変形されません。
は剛性が高く、最適化の際に変形されません。
は剛性が高く、最適化の際に変形されません。剛体の材料は等方対称性を持ち、密度が定義されている必要があります。材料ライブラリから等方性材料を選択することもできます。最適化の際には、密度のみが考慮されます。 変形可能な挙動を伴うリモート荷重と質量は、剛体ではサポートされていません。 熱検討ではボディを剛体としてマークできません。 |
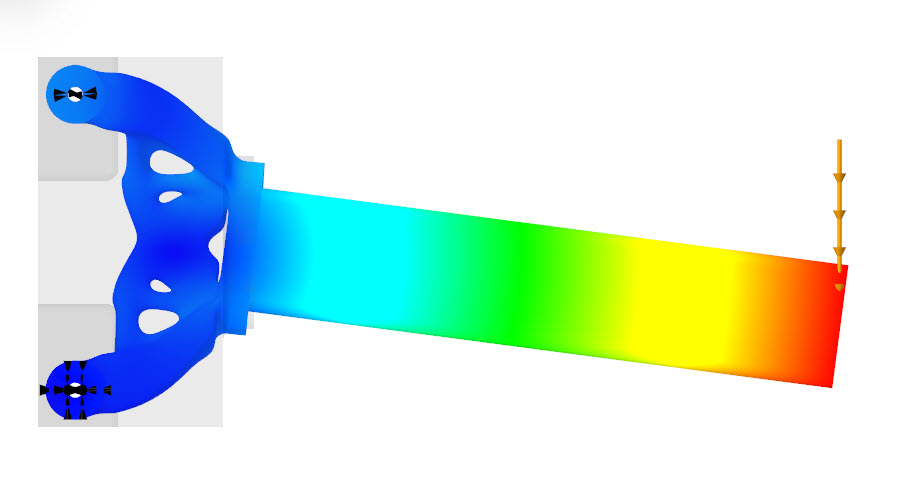
以下の図は、剛体の変位を示しています。
以下の図は、剛体の応力分布を示しています。
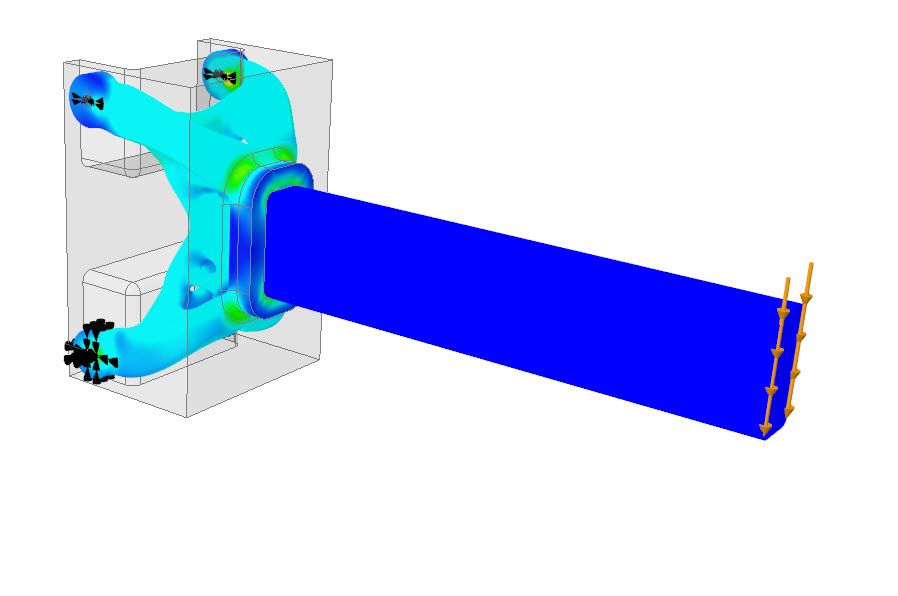
剛体の応力値は 0 MPa です。 |
ボディを剛体に変換するには
1. ジェネレーティブツリーで、「接続ジオメトリ」(Connected Geometry) ノードを展開します。
2. 変形可能ボディを選択し、右クリックして「剛体に変換」(Convert to Rigid) をクリックします。選択したボディが剛体になります。
ボディを変形可能ボディに変換するには
1. ジェネレーティブツリーで、「接続ジオメトリ」(Connected Geometry) ノードを展開します。
2. 剛体を選択し、右クリックして「変形可能に変換」(Convert to Deformable) をクリックします。選択したボディが変形可能ボディになります。
接触を修正するには
ジェネレーティブツリーで、修正する接触を選択し、ミニツールバーの  「定義を編集」(Edit Definition) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。結合されているボディを変更できます。
「定義を編集」(Edit Definition) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。結合されているボディを変更できます。
「定義を編集」(Edit Definition) をクリックします。「接触定義」(Contact Definition) ダイアログボックスが開きます。結合されているボディを変更できます。接触を削除するには
ジェネレーティブツリーで接触を右クリックし、 「削除」(Delete) をクリックします。
「削除」(Delete) をクリックします。
「削除」(Delete) をクリックします。接触の名前を変更するには
ジェネレーティブツリーで接触を右クリックし、「名前変更」(Rename) をクリックします。