Physik
Der PID-Regler korrigiert eine Steuerungsvariable  , indem er die Differenz
, indem er die Differenz  zwischen der gemessenen Prozessvariable (PV) und dem gewünschten Sollwert (SP) auswertet. Aus der Kombination der Ausdrücke proportional (P), Integral (I) und Ableitung (D) ergibt sich der Ausdruck PID-Regler. Diese drei Steuerungsausdrücke werden je nach Anwendung zusammen oder in Kombination von jeweils zwei Ausdrücken verwendet, um eine genaue und optimale Antwort zu erhalten. Der typische Workflow des PID-Reglers ist in der folgenden Abbildung dargestellt.
zwischen der gemessenen Prozessvariable (PV) und dem gewünschten Sollwert (SP) auswertet. Aus der Kombination der Ausdrücke proportional (P), Integral (I) und Ableitung (D) ergibt sich der Ausdruck PID-Regler. Diese drei Steuerungsausdrücke werden je nach Anwendung zusammen oder in Kombination von jeweils zwei Ausdrücken verwendet, um eine genaue und optimale Antwort zu erhalten. Der typische Workflow des PID-Reglers ist in der folgenden Abbildung dargestellt.
, indem er die Differenz zwischen der gemessenen Prozessvariable (PV) und dem gewünschten Sollwert (SP) auswertet. Aus der Kombination der Ausdrücke proportional (P), Integral (I) und Ableitung (D) ergibt sich der Ausdruck PID-Regler. Diese drei Steuerungsausdrücke werden je nach Anwendung zusammen oder in Kombination von jeweils zwei Ausdrücken verwendet, um eine genaue und optimale Antwort zu erhalten. Der typische Workflow des PID-Reglers ist in der folgenden Abbildung dargestellt.Blockdiagramm des PID-Reglers
Quelle: Wikipedia

Die Funktion, die die Steuerungsvariable steuert, liegt in den Formen "Parallel (Ideal)" (Parallel (Ideal)) und "Standard" (Standard) vor. Die Form "Parallel (Ideal)" (Parallel (Ideal)) der Steuerungsfunktion ist

Dabei gilt:
= Steuerungsvariable = Fehler zwischen Prozessvariable (PV) und Sollwert (SP) = Koeffizient für den Proportionalausdruck (Proportionalverstärkung)
= Koeffizient für den Proportionalausdruck (Proportionalverstärkung) = Koeffizient für den Integralausdruck (Integrale Verstärkung)
= Koeffizient für den Integralausdruck (Integrale Verstärkung) = Koeffizient für den Ableitungsausdruck (Ableitungsverstärkung)
= Koeffizient für den Ableitungsausdruck (Ableitungsverstärkung)Die Standardform der Steuerungsfunktion ist

Dabei gilt:
= Koeffizient für den Proportionalausdruck (Proportionalverstärkung) = Integralzeit, die Zeitprobe, in der der I-Regler versucht, den Fehler vollständig zu beseitigen
= Integralzeit, die Zeitprobe, in der der I-Regler versucht, den Fehler vollständig zu beseitigen = Vorhaltezeit, der Zeitpunkt, zu dem der Ableitungsausdruck versucht, den zukünftigen Fehler vorherzusagen
= Vorhaltezeit, der Zeitpunkt, zu dem der Ableitungsausdruck versucht, den zukünftigen Fehler vorherzusagenDie drei PID-Steuerungsausdrücke zeigen das folgende Verhalten:
Proportionalausdruck (P-Regler)
Der P-Regler liefert eine Ausgabe, die proportional zum aktuellen Fehlerwert (SP – PV) ist. Der resultierende Fehler zwischen dem Sollwert (SP) und der Prozessvariablen (PV) wird mit einer proportionalen Konstante () multipliziert, um die Ausgabe zu erhalten. Die Geschwindigkeit der Ausgabereaktion hängt von der Proportionalverstärkung () ab. Ein höherer Wert von () führt zu einer großen Änderung in der Ausgabe bei einem gegebenen Fehlerwert und kann dazu führen, dass das System instabil wird. Im Gegensatz dazu verringert ein kleinerer Wert von () die Reaktionsfähigkeit des Systems auf eine gegebene Änderung des Fehlers und auf etwaige Schwankungen im System. Der P-Regler arbeitet immer mit einem stationären Fehler, da er vollständig durch einen Fehlerwert ungleich Null gesteuert wird. Der Sollwert kann mit dem P-Regler nicht erreicht werden, da die angewendete Korrektur gegen Null geht und der Fehler gegen Null geht. Im allgemeinen deutet die industrielle Praxis darauf hin, dass der Proportionalausdruck den größten Teil der Ausgabereaktion ausmachen muss.
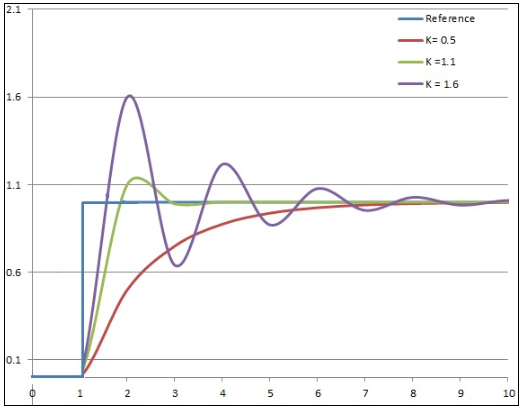
) multipliziert, um die Ausgabe zu erhalten. Die Geschwindigkeit der Ausgabereaktion hängt von der Proportionalverstärkung () ab. Ein höherer Wert von () führt zu einer großen Änderung in der Ausgabe bei einem gegebenen Fehlerwert und kann dazu führen, dass das System instabil wird. Im Gegensatz dazu verringert ein kleinerer Wert von () die Reaktionsfähigkeit des Systems auf eine gegebene Änderung des Fehlers und auf etwaige Schwankungen im System. Der P-Regler arbeitet immer mit einem stationären Fehler, da er vollständig durch einen Fehlerwert ungleich Null gesteuert wird. Der Sollwert kann mit dem P-Regler nicht erreicht werden, da die angewendete Korrektur gegen Null geht und der Fehler gegen Null geht. Im allgemeinen deutet die industrielle Praxis darauf hin, dass der Proportionalausdruck den größten Teil der Ausgabereaktion ausmachen muss.Die Reaktion eines Systems auf die Proportionalverstärkung () ist in der folgenden Abbildung dargestellt. Es ist zu sehen, dass mit Zunahme in () die Prozessvariable den Sollwert überschwingt und zu schwingen beginnt.
) ist in der folgenden Abbildung dargestellt. Es ist zu sehen, dass mit Zunahme in () die Prozessvariable den Sollwert überschwingt und zu schwingen beginnt.Reaktion von PV auf schrittweise Änderung von SP im Laufe der Zeit. () und () werden konstant gehalten
) und () werden konstant gehaltenQuelle: Wikipedia
Integralausdruck (I-Regler)
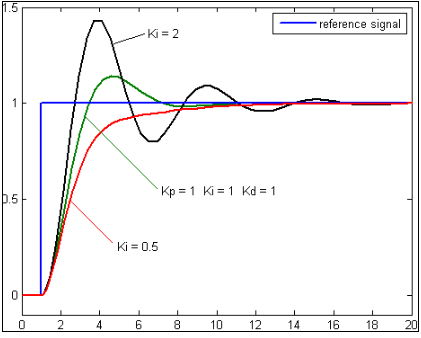
Der Integralausdruck berücksichtigt vergangene Fehlerwerte und integriert sie über einen bestimmten Zeitraum, bis der Fehler Null erreicht. Der I-Regler berücksichtigt, wie lange und wie weit die Prozessvariable vom Sollwert entfernt ist, im Gegensatz zum P-Regler, der nur berücksichtigt, wie weit sie vom Sollwert entfernt ist. Der I-Regler versucht, den Restfehler nach der Anwendung des P-Reglers zu eliminieren, indem er eine Verstärkung () zum kumulativen Fehlerwert hinzufügt. Der I-Regler wird in erster Linie zur Reduzierung von stationären Fehlern im System eingesetzt. Für viele Anwendungen werden P-I-Regler verwendet. Sie sind in diesen Fällen ausreichend, um eine gute Reaktion zu erzielen, indem sie mit dem P-Regler auf den Sollwert beschleunigen und den stationären Fehler mit dem I-Regler eliminieren. Wenn der I-Regler den kumulativen Fehler auf Null bringt, kann er jedoch manchmal die Ausgabereaktion überschwingen, wie in der folgenden Meldung gezeigt.
) zum kumulativen Fehlerwert hinzufügt. Der I-Regler wird in erster Linie zur Reduzierung von stationären Fehlern im System eingesetzt. Für viele Anwendungen werden P-I-Regler verwendet. Sie sind in diesen Fällen ausreichend, um eine gute Reaktion zu erzielen, indem sie mit dem P-Regler auf den Sollwert beschleunigen und den stationären Fehler mit dem I-Regler eliminieren. Wenn der I-Regler den kumulativen Fehler auf Null bringt, kann er jedoch manchmal die Ausgabereaktion überschwingen, wie in der folgenden Meldung gezeigt.Reaktion von PV auf schrittweise Änderung von SP im Laufe der Zeit. () und () werden konstant gehalten
) und () werden konstant gehaltenQuelle: Wikipedia
Ableitungsausdruck (D-Regler)
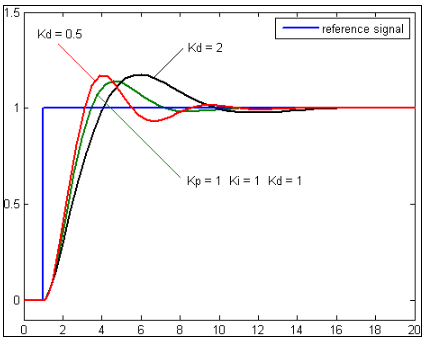
Der Ableitungsausdruck bestimmt die Steigung des Fehlers im Laufe der Zeit und multipliziert ihn mit einer Ableitungsverstärkung (). Der D-Regler antizipiert das zukünftige Verhalten des Fehlers auf der Grundlage der aktuellen Änderungsrate und beschleunigt die Systemausgabereaktion. Wenn die Änderung hoch ist oder die Steigung kontinuierlich variiert, ist eine hohe Dämpfungswirkung erforderlich, um die Änderung zu steuern. Der D-Regler bewegt das Steuergerät in eine Richtung, um der plötzlichen Änderung der Prozessvariable entgegenzuwirken. Ein reiner D-Regler kann den Fehler nicht auf Null bringen, da er nur die Änderungsrate des Fehlers berücksichtigt. Es wird lediglich versucht, die Änderungsrate auf Null zu bringen, indem das Überschwingen der Ausgabereaktion gedämpft und dadurch verringert wird, wie in der folgenden Abbildung dargestellt ist.
). Der D-Regler antizipiert das zukünftige Verhalten des Fehlers auf der Grundlage der aktuellen Änderungsrate und beschleunigt die Systemausgabereaktion. Wenn die Änderung hoch ist oder die Steigung kontinuierlich variiert, ist eine hohe Dämpfungswirkung erforderlich, um die Änderung zu steuern. Der D-Regler bewegt das Steuergerät in eine Richtung, um der plötzlichen Änderung der Prozessvariable entgegenzuwirken. Ein reiner D-Regler kann den Fehler nicht auf Null bringen, da er nur die Änderungsrate des Fehlers berücksichtigt. Es wird lediglich versucht, die Änderungsrate auf Null zu bringen, indem das Überschwingen der Ausgabereaktion gedämpft und dadurch verringert wird, wie in der folgenden Abbildung dargestellt ist.Reaktion von PV auf schrittweise Änderung von SP im Laufe der Zeit. () und () werden konstant gehalten
) und () werden konstant gehaltenQuelle: Wikipedia