Physique
Le régulateur PID applique une correction à une variable de contrôle  en évaluant la différence
en évaluant la différence  entre la variable de traitement (PV) mesurée et le point de consigne (SP) souhaité. La combinaison des termes proportionnel (P), intégral (I) et dérivé (D) est appelée régulateur PID. Ces trois termes de contrôle sont modifiés ensemble ou par deux en fonction de l'application pour obtenir une réponse précise et optimale. Le processus typique du régulateur PID est illustré dans la figure suivante.
entre la variable de traitement (PV) mesurée et le point de consigne (SP) souhaité. La combinaison des termes proportionnel (P), intégral (I) et dérivé (D) est appelée régulateur PID. Ces trois termes de contrôle sont modifiés ensemble ou par deux en fonction de l'application pour obtenir une réponse précise et optimale. Le processus typique du régulateur PID est illustré dans la figure suivante.
en évaluant la différence entre la variable de traitement (PV) mesurée et le point de consigne (SP) souhaité. La combinaison des termes proportionnel (P), intégral (I) et dérivé (D) est appelée régulateur PID. Ces trois termes de contrôle sont modifiés ensemble ou par deux en fonction de l'application pour obtenir une réponse précise et optimale. Le processus typique du régulateur PID est illustré dans la figure suivante.Schéma fonctionnel du régulateur PID
Source : Wikipédia

La fonction qui régit la variable de contrôle existe sous les formes Parallèle (Idéal) et Standard. La forme parallèle (idéale) de la fonction de contrôle est

où,
= variable de contrôle = erreur entre la variable de traitement (PV) et le point de consigne (SP) = coefficient pour le terme proportionnel (gain proportionnel)
= coefficient pour le terme proportionnel (gain proportionnel) = coefficient pour le terme d'intégrale (gain intégral)
= coefficient pour le terme d'intégrale (gain intégral) = coefficient pour le terme de dérivée (gain de dérivée)
= coefficient pour le terme de dérivée (gain de dérivée)La forme standard de la fonction de contrôle est

où,
= coefficient pour le terme proportionnel (gain proportionnel) = temps intégral : échantillon de temps pendant lequel le contrôleur I tente d'éliminer complètement l'erreur
= temps intégral : échantillon de temps pendant lequel le contrôleur I tente d'éliminer complètement l'erreur = temps de dérivée : moment auquel le terme de dérivée tente de prédire l'erreur future
= temps de dérivée : moment auquel le terme de dérivée tente de prédire l'erreur futureLe comportement de trois termes de contrôle de PID est le suivant :
Terme proportionnel (Contrôleur P)
Le contrôleur P fournit une sortie proportionnelle à la valeur d'erreur actuelle (SP - PV). L'erreur qui en résulte entre le point de consigne (SP) et la variable de traitement (PV) est multipliée par une constante proportionnelle () pour obtenir la sortie. La vitesse de la réponse de sortie dépend du gain proportionnel (). Une valeur élevée de () entraîne une grande modification de la sortie pour une valeur d'erreur donnée et peut rendre le système instable. En revanche, une valeur faible de () rend le système moins réactif à une modification donnée de l'erreur et à toutes les fluctuations du système. Le contrôleur P fonctionne toujours avec une erreur d'état stable, car il est entièrement piloté par une valeur d'erreur non nulle. Le point de consigne ne peut pas être atteint avec le contrôleur P, car la correction appliquée et l'erreur sont proches de zéro. D'une manière générale, les pratiques industrielles donnent à penser que le terme proportionnel doit contribuer à l'essentiel de la réponse à la sortie.
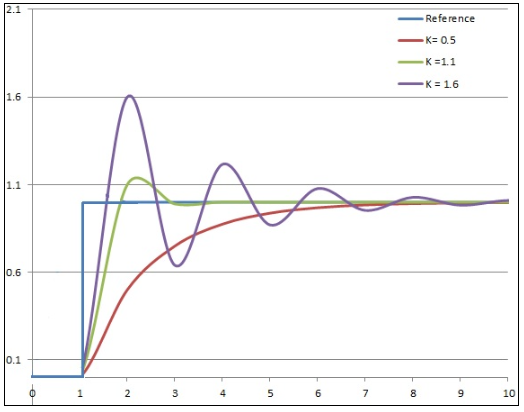
) pour obtenir la sortie. La vitesse de la réponse de sortie dépend du gain proportionnel (). Une valeur élevée de () entraîne une grande modification de la sortie pour une valeur d'erreur donnée et peut rendre le système instable. En revanche, une valeur faible de () rend le système moins réactif à une modification donnée de l'erreur et à toutes les fluctuations du système. Le contrôleur P fonctionne toujours avec une erreur d'état stable, car il est entièrement piloté par une valeur d'erreur non nulle. Le point de consigne ne peut pas être atteint avec le contrôleur P, car la correction appliquée et l'erreur sont proches de zéro. D'une manière générale, les pratiques industrielles donnent à penser que le terme proportionnel doit contribuer à l'essentiel de la réponse à la sortie.La réponse d'un système au gain proportionnel () est illustrée dans l'image suivante. On peut voir qu'avec l'augmentation de (), la variable de traitement dépasse le point de consigne et commence à osciller.
) est illustrée dans l'image suivante. On peut voir qu'avec l'augmentation de (), la variable de traitement dépasse le point de consigne et commence à osciller.Réponse de la variable de traitement au changement d'étape du point de consigne dans le temps. () et () sont maintenus constants
) et () sont maintenus constantsSource : Wikipédia
Terme intégral (Contrôleur I)
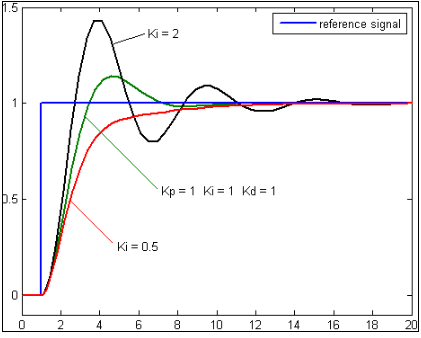
Le terme d'intégrale tient compte des valeurs d'erreur passées et les intègre sur une période de temps, jusqu'à ce que l'erreur atteigne zéro. Le contrôleur I considère la distance entre la variable de processus et le point de consigne, contrairement au contrôleur P qui ne considère que la distance qui l'éloigne du point de consigne. Le contrôleur I cherche à éliminer l'erreur résiduelle après l'application du contrôleur P en ajoutant un gain () à la valeur cumulée de l'erreur. Le contrôleur I est principalement utilisé pour réduire les erreurs en régime permanent dans le système. Pour de nombreuses applications, les contrôleurs P-I sont combinés et suffisants pour obtenir une bonne réponse, accélérant jusqu'au point de consigne avec le contrôleur P et éliminant l'erreur d'état stable avec le contrôleur I. Cependant, dans le processus de réduction à zéro de l'erreur cumulée, le contrôleur I peut parfois dépasser la réponse de sortie, comme indiqué dans le message suivant.
) à la valeur cumulée de l'erreur. Le contrôleur I est principalement utilisé pour réduire les erreurs en régime permanent dans le système. Pour de nombreuses applications, les contrôleurs P-I sont combinés et suffisants pour obtenir une bonne réponse, accélérant jusqu'au point de consigne avec le contrôleur P et éliminant l'erreur d'état stable avec le contrôleur I. Cependant, dans le processus de réduction à zéro de l'erreur cumulée, le contrôleur I peut parfois dépasser la réponse de sortie, comme indiqué dans le message suivant.Réponse de la variable de traitement au changement d'étape du point de consigne dans le temps. () et () sont maintenus constants
) et () sont maintenus constantsSource : Wikipédia
Terme de dérivée (contrôleur D)
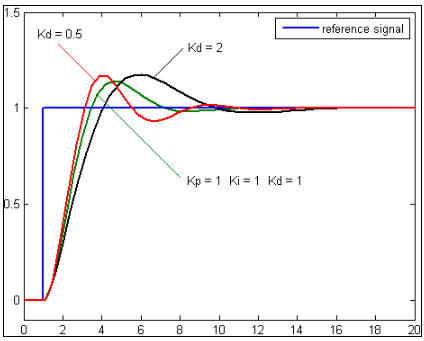
Le terme dérivé détermine la pente de l'erreur au fil du temps et la multiplie par une dérivée de gain (). Le contrôleur D anticipe le comportement futur de l'erreur en fonction de la vitesse de modification actuelle et accélère la réponse de sortie du système. Si le changement est important ou si la pente varie continuellement, un effet d'amortissement élevé est nécessaire pour contrôler le changement. Le contrôleur D déplace le dispositif de contrôle dans une direction pour contrer le changement soudain de la variable de traitement. Un contrôleur D pur ne peut pas ramener l'erreur à zéro, car il ne prend en compte que la vitesse de modification de l'erreur. Il tente uniquement de ramener le taux de modification à zéro par l'amortissement, réduisant ainsi le dépassement de la réponse de sortie, comme illustré dans la figure suivante.
). Le contrôleur D anticipe le comportement futur de l'erreur en fonction de la vitesse de modification actuelle et accélère la réponse de sortie du système. Si le changement est important ou si la pente varie continuellement, un effet d'amortissement élevé est nécessaire pour contrôler le changement. Le contrôleur D déplace le dispositif de contrôle dans une direction pour contrer le changement soudain de la variable de traitement. Un contrôleur D pur ne peut pas ramener l'erreur à zéro, car il ne prend en compte que la vitesse de modification de l'erreur. Il tente uniquement de ramener le taux de modification à zéro par l'amortissement, réduisant ainsi le dépassement de la réponse de sortie, comme illustré dans la figure suivante.Réponse de la variable de traitement au changement d'étape du point de consigne dans le temps. () et () sont maintenus constants
) et () sont maintenus constantsSource : Wikipédia