實體
PID 控制器會透過評估量測的流程變數 (PV) 與所需設定點 (SP) 之間的差  來將修正套用至控制變數
來將修正套用至控制變數  。比例 (P)、積分 (I) 和微分 (D) 項組合在一起,稱為 PID 控制器。這三個控制項會根據應用一起變化或兩個控制項組合變化,以獲得準確且最佳的回應。PID 控制器的典型工作流程顯示在下圖中。
。比例 (P)、積分 (I) 和微分 (D) 項組合在一起,稱為 PID 控制器。這三個控制項會根據應用一起變化或兩個控制項組合變化,以獲得準確且最佳的回應。PID 控制器的典型工作流程顯示在下圖中。
來將修正套用至控制變數 。比例 (P)、積分 (I) 和微分 (D) 項組合在一起,稱為 PID 控制器。這三個控制項會根據應用一起變化或兩個控制項組合變化,以獲得準確且最佳的回應。PID 控制器的典型工作流程顯示在下圖中。PID 控制器區塊圖
來源:維基百科

可控制控制變數的函數存在於「平行 (理想)」與「標準」形式中。控制函數的「平行 (理想)」形式為

其中,
= 控制變數 = 流程變數 (PV) 與設定點 (SP) 之間的誤差 = 比例項的係數 (比例增益)
= 比例項的係數 (比例增益) = 積分項的係數 (積分增益)
= 積分項的係數 (積分增益) = 微分項的係數 (微分增益)
= 微分項的係數 (微分增益)控制函數的標準形式為

其中,
= 比例項的係數 (比例增益) = 積分時間,I 控制器嘗試完全消除誤差的採樣時間
= 積分時間,I 控制器嘗試完全消除誤差的採樣時間 = 微分時間,微分項嘗試預測未來誤差的時間
= 微分時間,微分項嘗試預測未來誤差的時間PID 三個控制項的行為是:
比例項 (P - 控制器)
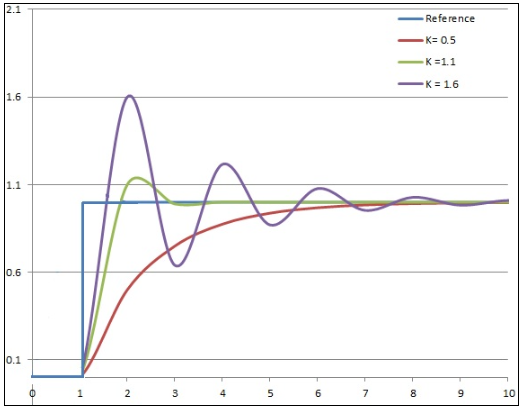
P 控制器提供與目前誤差值 (SP - PV) 成比例的輸出。將設定點 (SP) 與流程變數 (PV) 之間產生的誤差乘以比例常數 () 即可獲得輸出。輸出回應的速度取決於比例增益 ()。較高的 () 值會導致指定誤差值的輸出發生較大變更,且可導致系統不穩定。相比之下,較小的 () 值會讓系統對指定誤差變更及任何系統波動的回應較慢。P 控制器始終會伴隨著穩態誤差操作,因其完全由非零誤差值驅動。使用 P 控制器無法實現設定點,因為隨著誤差趨近於零,套用的修正也會趨近於零。一般而言,工業實踐建議,比例項必須在輸出回應中占主導地位。
) 即可獲得輸出。輸出回應的速度取決於比例增益 ()。較高的 () 值會導致指定誤差值的輸出發生較大變更,且可導致系統不穩定。相比之下,較小的 () 值會讓系統對指定誤差變更及任何系統波動的回應較慢。P 控制器始終會伴隨著穩態誤差操作,因其完全由非零誤差值驅動。使用 P 控制器無法實現設定點,因為隨著誤差趨近於零,套用的修正也會趨近於零。一般而言,工業實踐建議,比例項必須在輸出回應中占主導地位。系統對比例增益 () 的回應顯示在下圖中。可以看出,隨著 () 的增加,流程變數會導致設定點過衝並開始振盪。
) 的回應顯示在下圖中。可以看出,隨著 () 的增加,流程變數會導致設定點過衝並開始振盪。PV 對 SP 階梯式變更隨時間的回應。() 與 () 會保持不變
) 與 () 會保持不變來源:維基百科
積分項 (I - 控制器)
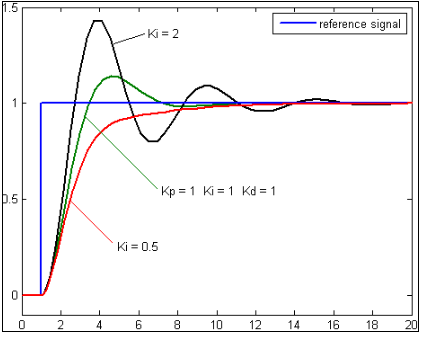
積分項會考量過去的誤差值,並在一段時間內對其進行積分,直到誤差達到零為止。I 控制器會考慮流程變數遠離設定點的時間長度與距離,而這與 P 控制器不同,其只會考慮遠離設定點的距離。I 控制器試圖透過對誤差累積值增加增益 () 來消除應用 P 控制器之後的殘餘誤差。I 控制器主要用來減少系統中的穩態誤差。對於許多應用,P-I 控制器組合使用,足以獲得良好回應,使用 P 控制器可加速達到設定點,而使用 I 控制器可消除穩態誤差。但是,在將累積誤差降至零的過程中,I 控制器有時可能會導致輸出回應過衝,如以下訊息所示。
) 來消除應用 P 控制器之後的殘餘誤差。I 控制器主要用來減少系統中的穩態誤差。對於許多應用,P-I 控制器組合使用,足以獲得良好回應,使用 P 控制器可加速達到設定點,而使用 I 控制器可消除穩態誤差。但是,在將累積誤差降至零的過程中,I 控制器有時可能會導致輸出回應過衝,如以下訊息所示。PV 對 SP 階梯式變更隨時間的回應。() 與 () 會保持不變
) 與 () 會保持不變來源:維基百科
微分項 (D - 控制器)
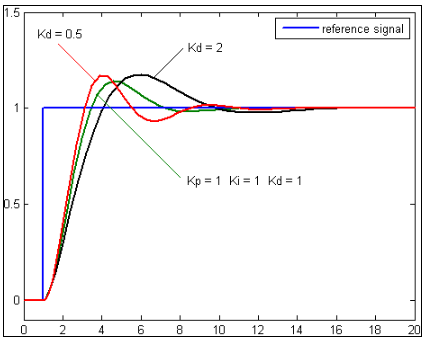
微分項會決定誤差隨時間變化的斜率,並將其乘以微分增益 ()。D 控制器會根據目前的變更率預測誤差的未來行為,並加快系統輸出回應。如果變更較高或斜率連續變化,需要高阻尼效應來控制變更。D 控制器會沿某一方向移動控制裝置,以抵消流程變數的突然變更。純 D 控制器無法將誤差降至零,因其只會考慮誤差的變更率。它只會嘗試透過阻尼將變更率降至零,進而減少輸出回應的過衝,如下圖所示。
)。D 控制器會根據目前的變更率預測誤差的未來行為,並加快系統輸出回應。如果變更較高或斜率連續變化,需要高阻尼效應來控制變更。D 控制器會沿某一方向移動控制裝置,以抵消流程變數的突然變更。純 D 控制器無法將誤差降至零,因其只會考慮誤差的變更率。它只會嘗試透過阻尼將變更率降至零,進而減少輸出回應的過衝,如下圖所示。PV 對 SP 階梯式變更隨時間的回應。() 與 () 會保持不變
) 與 () 會保持不變來源:維基百科