강체의 동작
시뮬레이션에서 솔리드 객체의 서피스는 일반적으로 흐름 도메인의 벽 경계입니다. 솔리드 객체나 서피스가 역학 및 기계적 힘과 열 효과의 영향을 받을 때 알짜 힘의 불균형으로 인해 바디가 이동 및 변형될 수 있습니다. 솔리드 객체는 흐름 시뮬레이션에서 강체로 간주되는 경우가 많습니다. 따라서 힘 불균형의 영향을 받는 솔리드 객체의 경우 해당 객체가 변형 없이 선형 이동(변환)과 각도상 이동(회전) 중 하나를 수행하거나 둘 다를 수행할 수 있다고 가정합니다. 그러나 CFA 계산 도메인의 경우 경계 이동으로 인해 도메인 변경이 발생할 수 있으며 결과적으로 흐름(Flow) 모듈에 설명된 대로 볼륨 메쉬가 변형될 수 있습니다.
강체의 경우 해당 동작을 제어하는 방정식은 선형 및 각 운동량 보존에서 직접 파생됩니다.
• 선형 운동량(변환)
방정식 2.426
• 각 운동량(회전)
방정식 2.427
방정식 2.426에서  은 이동 객체의 질량입니다.
은 이동 객체의 질량입니다.  은 선형/변환 속도이고,
은 선형/변환 속도이고,  은 변환 대상 바디에 적용된 총/알짜 힘입니다. 방정식 2.427에서
은 변환 대상 바디에 적용된 총/알짜 힘입니다. 방정식 2.427에서  은 관성 모멘트입니다.
은 관성 모멘트입니다.  은 각속도이고,
은 각속도이고,  은 회전 바디에 적용된 총/알짜 토크입니다.
은 회전 바디에 적용된 총/알짜 토크입니다.
은 이동 객체의 질량입니다. 은 선형/변환 속도이고, 은 변환 대상 바디에 적용된 총/알짜 힘입니다. 방정식 2.427에서 은 관성 모멘트입니다. 은 각속도이고, 은 회전 바디에 적용된 총/알짜 토크입니다.방정식 2.426 및 방정식 2.427은 각각 변환(3-DOF) 및 회전(3-DOF)을 위한 세 개의 각도를 포함하는 6개 자유도(6-DOF)가 있는 솔리드 바디의 일반 동작을 제어합니다. Creo Flow Analysis에서는 이 단원에서 설명하는 1-DOF 변환 및 회전만 고려합니다.
1-DOF 변환
솔리드 바디가 단위 벡터  에서 정의한 임의로 지정된 방향에서 선형으로 이동(변경되지 않은 상태 유지)한다는 가정에서 솔리드 바디의 변환 동작은 1 자유도(1-DOF)로 줄어듭니다. 따라서 선형 운동량 보존의 경우 방정식 2.426은 이동 속도와 힘이
에서 정의한 임의로 지정된 방향에서 선형으로 이동(변경되지 않은 상태 유지)한다는 가정에서 솔리드 바디의 변환 동작은 1 자유도(1-DOF)로 줄어듭니다. 따라서 선형 운동량 보존의 경우 방정식 2.426은 이동 속도와 힘이  을 기준으로 표현되므로 이동 방향에 따라 스칼라 방정식이 됩니다.
을 기준으로 표현되므로 이동 방향에 따라 스칼라 방정식이 됩니다.
에서 정의한 임의로 지정된 방향에서 선형으로 이동(변경되지 않은 상태 유지)한다는 가정에서 솔리드 바디의 변환 동작은 1 자유도(1-DOF)로 줄어듭니다. 따라서 선형 운동량 보존의 경우 방정식 2.426은 이동 속도와 힘이 을 기준으로 표현되므로 이동 방향에 따라 스칼라 방정식이 됩니다.
방정식 2.428

방정식 2.429
방정식 2.430
여기서  은 이동 방향
은 이동 방향  에 따라 솔리드 바디에 대한 관심 지점에서의 위치 벡터
에 따라 솔리드 바디에 대한 관심 지점에서의 위치 벡터  의 강도입니다. 카티시안 좌표계에서는 다음을 사용할 수 있습니다.
의 강도입니다. 카티시안 좌표계에서는 다음을 사용할 수 있습니다.
은 이동 방향 에 따라 솔리드 바디에 대한 관심 지점에서의 위치 벡터 의 강도입니다. 카티시안 좌표계에서는 다음을 사용할 수 있습니다.
방정식 2.431
솔리드 바디의 질량이 일정하게 유지되고 힘 항을 확장하여 바디에 적용된 모든 힘을 명시적으로 포함하는 경우 다음과 같은 스칼라 선형 운동량 방정식을 사용할 수 있습니다.

방정식 2.432
오른쪽에 있는 힘은 다음을 나타냅니다.
• 동유체력  - 압력 및 전단력으로 구성됩니다. 이러한 힘은 흐름과 접촉하는 솔리드 바디의 서피스와 유체 흐름 간의 상대적 동작에 의해 발생합니다. 압력 및 전단력은 흐름 솔루션(출력 수량)에서 구합니다.
- 압력 및 전단력으로 구성됩니다. 이러한 힘은 흐름과 접촉하는 솔리드 바디의 서피스와 유체 흐름 간의 상대적 동작에 의해 발생합니다. 압력 및 전단력은 흐름 솔루션(출력 수량)에서 구합니다.
- 압력 및 전단력으로 구성됩니다. 이러한 힘은 흐름과 접촉하는 솔리드 바디의 서피스와 유체 흐름 간의 상대적 동작에 의해 발생합니다. 압력 및 전단력은 흐름 솔루션(출력 수량)에서 구합니다.
방정식 2.433
• 댐핑 힘  - 마찰 댐핑 효과에 의해 발생하는 억제 힘입니다. 이러한 힘은 솔리드 객체의 동작과 사용자 정의 댐핑 계수
- 마찰 댐핑 효과에 의해 발생하는 억제 힘입니다. 이러한 힘은 솔리드 객체의 동작과 사용자 정의 댐핑 계수  에 의해 결정됩니다.
에 의해 결정됩니다.
- 마찰 댐핑 효과에 의해 발생하는 억제 힘입니다. 이러한 힘은 솔리드 객체의 동작과 사용자 정의 댐핑 계수 에 의해 결정됩니다.
방정식 2.434
• 스프링력  - 스프링
- 스프링  , 스프링 상수
, 스프링 상수  및 스프링 예비 하중 힘
및 스프링 예비 하중 힘  의 변위에 따라 달라집니다.
의 변위에 따라 달라집니다.
- 스프링 , 스프링 상수 및 스프링 예비 하중 힘 의 변위에 따라 달라집니다.
방정식 2.435
여기서 스프링 변위  은 다음과 같이 정의됩니다.
은 다음과 같이 정의됩니다.
은 다음과 같이 정의됩니다.
방정식 2.436
여기서  은 이전 위치
은 이전 위치  에서의 위치 벡터
에서의 위치 벡터  의 강도입니다.
의 강도입니다.
은 이전 위치 에서의 위치 벡터 의 강도입니다.• 마찰력 - 역학 시스템에서의 마찰 효과를 계산하기 위해 접촉 마찰 모델이 채택됩니다. 마찰력  은 다음과 같이 모델링됩니다.
은 다음과 같이 모델링됩니다.
은 다음과 같이 모델링됩니다.
방정식 2.437
여기서  은 관심 솔리드 서피스에 적용된 접촉력의 수직 컴포넌트입니다. 마찰 계수
은 관심 솔리드 서피스에 적용된 접촉력의 수직 컴포넌트입니다. 마찰 계수  의 경우 정적 마찰 계수
의 경우 정적 마찰 계수  및 슬라이딩 마찰 계수
및 슬라이딩 마찰 계수  이 각각 고정 바디와 이동 바디에 대해 추가로 도입됩니다.
이 각각 고정 바디와 이동 바디에 대해 추가로 도입됩니다.
은 관심 솔리드 서피스에 적용된 접촉력의 수직 컴포넌트입니다. 마찰 계수 의 경우 정적 마찰 계수 및 슬라이딩 마찰 계수 이 각각 고정 바디와 이동 바디에 대해 추가로 도입됩니다.
방정식 2.438
• 추가 힘  - 추가 사용자 지정 힘으로 추가됩니다.
- 추가 사용자 지정 힘으로 추가됩니다.
- 추가 사용자 지정 힘으로 추가됩니다.1-DOF 회전
임의 회전 축이 점(축 중심) 및 방향 단위 벡터
및 방향 단위 벡터  에 의해 정의되면 축
에 의해 정의되면 축  주위의 솔리드 바디 회전도 1-DOF 회전으로 감소합니다. 마찬가지로 각 운동량 보존의 경우 방정식 2.427도 다음과 같이 정의된 탄젠트 방향
주위의 솔리드 바디 회전도 1-DOF 회전으로 감소합니다. 마찬가지로 각 운동량 보존의 경우 방정식 2.427도 다음과 같이 정의된 탄젠트 방향  을 따라 스칼라 방정식이 됩니다.
을 따라 스칼라 방정식이 됩니다.
및 방향 단위 벡터 에 의해 정의되면 축 주위의 솔리드 바디 회전도 1-DOF 회전으로 감소합니다. 마찬가지로 각 운동량 보존의 경우 방정식 2.427도 다음과 같이 정의된 탄젠트 방향 을 따라 스칼라 방정식이 됩니다.
방정식 2.439
여기서  은 축의 중심에서 솔리드 바디의 임의의 점
은 축의 중심에서 솔리드 바디의 임의의 점  을 가리키는 벡터입니다.
을 가리키는 벡터입니다.
은 축의 중심에서 솔리드 바디의 임의의 점 을 가리키는 벡터입니다.
방정식 2.440
점  의 각속도 및 토크는 다음과 같이 다시 작성됩니다.
의 각속도 및 토크는 다음과 같이 다시 작성됩니다.
의 각속도 및 토크는 다음과 같이 다시 작성됩니다.
방정식 2.441

방정식 2.442

방정식 2.443
여기서  은 시작 또는 참조 위치에 상대적인 점
은 시작 또는 참조 위치에 상대적인 점  의 회전 각도입니다.
의 회전 각도입니다.
은 시작 또는 참조 위치에 상대적인 점 의 회전 각도입니다.관성 모멘트가 일정하게 유지되고 토크 항을 확장하여 회전 바디에 적용된 모든 토크를 명시적으로 포함하는 경우 다음과 같은 스칼라 각 운동량 방정식을 사용할 수 있습니다.

방정식 2.444
오른쪽에 있는 토크 항은 다음과 같이 정의됩니다.
• 동유체 토크  - 압력 및 전단력으로 인한 토크의 조합입니다.
- 압력 및 전단력으로 인한 토크의 조합입니다.
- 압력 및 전단력으로 인한 토크의 조합입니다.
방정식 2.445
• 댐핑 토크  - 회전 속도
- 회전 속도  및 사용자 정의 댐핑 계수
및 사용자 정의 댐핑 계수  에 따라 달라집니다.
에 따라 달라집니다.
- 회전 속도 및 사용자 정의 댐핑 계수 에 따라 달라집니다.
방정식 2.446
• 스프링 토크  - 변위 각도
- 변위 각도  , 사용자 정의 예비 하중 토크
, 사용자 정의 예비 하중 토크  및 비틀림 상수
및 비틀림 상수  에 따라 달라지는 비틀림에 의해 유도되는 토크입니다.
에 따라 달라지는 비틀림에 의해 유도되는 토크입니다.
- 변위 각도 , 사용자 정의 예비 하중 토크 및 비틀림 상수 에 따라 달라지는 비틀림에 의해 유도되는 토크입니다.
방정식 2.447
여기서  은 참조 각도입니다. 이는 일반적으로 모델을 설정하는 동안의 경계 또는 볼륨의 위치이지만 다른 위치에 해당할 수 있습니다. 예를 들어 제로 각변위에서는 참조 각도
은 참조 각도입니다. 이는 일반적으로 모델을 설정하는 동안의 경계 또는 볼륨의 위치이지만 다른 위치에 해당할 수 있습니다. 예를 들어 제로 각변위에서는 참조 각도  이 초기 각도 위치와 동일하지 않습니다.
이 초기 각도 위치와 동일하지 않습니다.
은 참조 각도입니다. 이는 일반적으로 모델을 설정하는 동안의 경계 또는 볼륨의 위치이지만 다른 위치에 해당할 수 있습니다. 예를 들어 제로 각변위에서는 참조 각도 이 초기 각도 위치와 동일하지 않습니다.• 마찰 토크 - 접촉에서 두 개의 객체가 이동할 때 발생하는 마찰 힘에 의해 발생하는 토크입니다. 실험에서는 적용된 토크와 관측된 토크 또는 순 토크 간의 차이에 의해 결정됩니다. 이는 접촉 서피스에 적용된 수직항력  으로 인한 마찰 계수
으로 인한 마찰 계수  및 접촉 토크에 따라 달라집니다.
및 접촉 토크에 따라 달라집니다.
으로 인한 마찰 계수 및 접촉 토크에 따라 달라집니다.
방정식 2.448
여기서  은 방정식 2.438에 정의된 사용자 정의 매개 변수입니다.
은 방정식 2.438에 정의된 사용자 정의 매개 변수입니다.
은 방정식 2.438에 정의된 사용자 정의 매개 변수입니다.• 추가 토크  - 추가 사용자 지정 토크용으로 추가되었습니다.
- 추가 사용자 지정 토크용으로 추가되었습니다.
- 추가 사용자 지정 토크용으로 추가되었습니다.바운스 모델
대부분의 경우 솔리드 바디는 제한된 공간(제한된 거리 또는 각도)에서 변환과 회전 중 하나 또는 둘 다를 수행합니다. 즉, 솔리드 바디에 최대 위치와 최소 위치 중 하나 또는 둘 다가 포함됩니다. 예를 들어, 다음 그림과 같이 각도가  인 원래 위치에서 단순 중력 진자가 해제될 때 해당 질량에 대해 작용하는 복원력으로 인해 진자가 평형 위치에 대해 진동합니다. 평형 위치
인 원래 위치에서 단순 중력 진자가 해제될 때 해당 질량에 대해 작용하는 복원력으로 인해 진자가 평형 위치에 대해 진동합니다. 평형 위치  의 한쪽 측면에 대한 최대 각도는 해당 해제 위치
의 한쪽 측면에 대한 최대 각도는 해당 해제 위치  에 따라 달라집니다. 마찰이 없는 경우(무마찰 및 진공 상태) 최대 각도는 변경되지 않은 상태로 유지되고 진자는 동일한 극단적 위치에서 계속 앞뒤로 흔들립니다. 그러나 진자가 대기 중에 있을 때 공기 저항(댐핑) 등으로 인해 최대 스윙 각도가 시간 경과에 따라 감소하여 결국 평형 위치에서 멈춥니다.
에 따라 달라집니다. 마찰이 없는 경우(무마찰 및 진공 상태) 최대 각도는 변경되지 않은 상태로 유지되고 진자는 동일한 극단적 위치에서 계속 앞뒤로 흔들립니다. 그러나 진자가 대기 중에 있을 때 공기 저항(댐핑) 등으로 인해 최대 스윙 각도가 시간 경과에 따라 감소하여 결국 평형 위치에서 멈춥니다.
인 원래 위치에서 단순 중력 진자가 해제될 때 해당 질량에 대해 작용하는 복원력으로 인해 진자가 평형 위치에 대해 진동합니다. 평형 위치 의 한쪽 측면에 대한 최대 각도는 해당 해제 위치 에 따라 달라집니다. 마찰이 없는 경우(무마찰 및 진공 상태) 최대 각도는 변경되지 않은 상태로 유지되고 진자는 동일한 극단적 위치에서 계속 앞뒤로 흔들립니다. 그러나 진자가 대기 중에 있을 때 공기 저항(댐핑) 등으로 인해 최대 스윙 각도가 시간 경과에 따라 감소하여 결국 평형 위치에서 멈춥니다.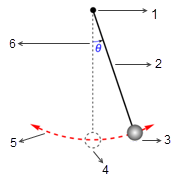
그림
1. 무마찰 피봇
2. 무질량 봉
3. 대용량 봅
4. 평형 위치
5. 봅 궤적
6. 진폭
또한 스윙 주기(기간)에서 진자가 가장 높은 위치  에 도달하면 운동 에너지의 총 손실에 따라 방향이 변경됩니다. 단순 중력 진자에서 운동 에너지는 잠재적 에너지로 완전히 전송되지만 매체의 저항을 고려할 때 점성 댐핑을 극복하기 위해 운동 에너지의 일부가 손실됩니다. 그러나 알짜 힘 또는 잠재적 에너지로 인해 진자가 평형 위치를 향해 반대 방향으로 이동하기 시작합니다. 여기서 운동 에너지(속도)는 최대이며 잠재적 에너지는 최저입니다. 이 경우
에 도달하면 운동 에너지의 총 손실에 따라 방향이 변경됩니다. 단순 중력 진자에서 운동 에너지는 잠재적 에너지로 완전히 전송되지만 매체의 저항을 고려할 때 점성 댐핑을 극복하기 위해 운동 에너지의 일부가 손실됩니다. 그러나 알짜 힘 또는 잠재적 에너지로 인해 진자가 평형 위치를 향해 반대 방향으로 이동하기 시작합니다. 여기서 운동 에너지(속도)는 최대이며 잠재적 에너지는 최저입니다. 이 경우  은 1-DOF 각 운동량 방정식 2.444에 대한 바운스 없음 조건을 나타냅니다.
은 1-DOF 각 운동량 방정식 2.444에 대한 바운스 없음 조건을 나타냅니다.
에 도달하면 운동 에너지의 총 손실에 따라 방향이 변경됩니다. 단순 중력 진자에서 운동 에너지는 잠재적 에너지로 완전히 전송되지만 매체의 저항을 고려할 때 점성 댐핑을 극복하기 위해 운동 에너지의 일부가 손실됩니다. 그러나 알짜 힘 또는 잠재적 에너지로 인해 진자가 평형 위치를 향해 반대 방향으로 이동하기 시작합니다. 여기서 운동 에너지(속도)는 최대이며 잠재적 에너지는 최저입니다. 이 경우 은 1-DOF 각 운동량 방정식 2.444에 대한 바운스 없음 조건을 나타냅니다.바운스 없음 조건 외에도 제한 위치의 이동 바디는 운동 에너지를 전혀 손실하지 않고 뒤로 바운스하거나(완전 바운스) 해당 운동 에너지의 일부만 손실할 수 있습니다(부분 바운스). 따라서 흐름 도메인에 대한 벽 경계 또는 솔리드 바디의 동작을 결정하기 위해 변환 및 회전의 1-DOF 역학 방정식 방정식 2.432 및 방정식 2.444를 풀 때 다음 세 가지 바운스 조건이 적용됩니다.
• 바운스 없음 - Creo Flow Analysis의 기본 모델입니다. 이렇게 하면 솔리드 바디 또는 경계가 해당 동작의 한계에 도달할 때 해당 운동 에너지의 총 손실에 따라 방향이 변경됩니다. 바운스 및 입사를 나타내는  및
및  와
와  및
및  전환 및 회전 속도(속도 크기만 해당)를 사용하는 경우 이 바운스 모델은 다음과 같이 표현됩니다.
전환 및 회전 속도(속도 크기만 해당)를 사용하는 경우 이 바운스 모델은 다음과 같이 표현됩니다.
및 와 및 전환 및 회전 속도(속도 크기만 해당)를 사용하는 경우 이 바운스 모델은 다음과 같이 표현됩니다.◦ 변환

방정식 2.449
◦ 회전

방정식 2.450
• 부분 바운스 - 솔리드 바디 또는 경계가 해당 동작의 한계에 도달할 때 사용자가 지정한 계수인  에 의해 결정되는 해당 운동 에너지의 부분 손실에 따라 방향이 변경되도록 지정하는 모델입니다.
에 의해 결정되는 해당 운동 에너지의 부분 손실에 따라 방향이 변경되도록 지정하는 모델입니다.
에 의해 결정되는 해당 운동 에너지의 부분 손실에 따라 방향이 변경되도록 지정하는 모델입니다.◦ 변환

방정식 2.451
◦ 회전

방정식 2.452
• 완전 바운스 - 솔리드 바디 또는 경계가 동작의 한계에 도달할 때 해당 운동 에너지  손실이 0인 상태에 따라 방향을 변경하도록 지정하는 모델입니다.
손실이 0인 상태에 따라 방향을 변경하도록 지정하는 모델입니다.
손실이 0인 상태에 따라 방향을 변경하도록 지정하는 모델입니다.◦ 변환

방정식 2.453
◦ 회전

방정식 2.454