关于预定义约束集
预定义约束集定义了元件在装配中的运动。预定义的约束集包含用于定义连接类型(有或无运动轴)的约束。连接定义特定类型的运动。在确定了哪种连接允许您所需的运动类型后,请从列表中选择它,随之将出现相应的约束。不能删除、更改或移除这些约束。不能添加新的约束。在“模型树”中将使用特殊图标  来表示通过预定义约束集放置的元件。
来表示通过预定义约束集放置的元件。
来表示通过预定义约束集放置的元件。“刚性”(Rigid)、“焊缝”(Weld)、“用户定义的”(User-Defined)、“球”(Ball) 和“万向节”(Gimbal) 预定义集没有运动轴。“球”(Ball) 和“万向节”(Gimbal) 约束集有运动,但是没有轴。
在“机构设计”中,所有预定义约束集均可编辑。有关详细信息,请在“帮助中心”中进行搜索。
在“导航”和“收集”区域中选择运动轴。“运动设置属性”(Motion Settings Properties) 区域出现,可让您指定运动轴属性。
集类型
使用预定义约束集放置的元件有意地未进行充分约束,以保留一个或多个自由度。配置了预定义的约束集后,将元件拖动到正确位置以允许进行所需的运动。
• 刚性 (Rigid) - 连接两个元件,使其无法相对移动。可使用任意有效的约束集约束它们。如此连接的元件将变为单个主体。刚性连接集约束类似于用户定义的约束集。
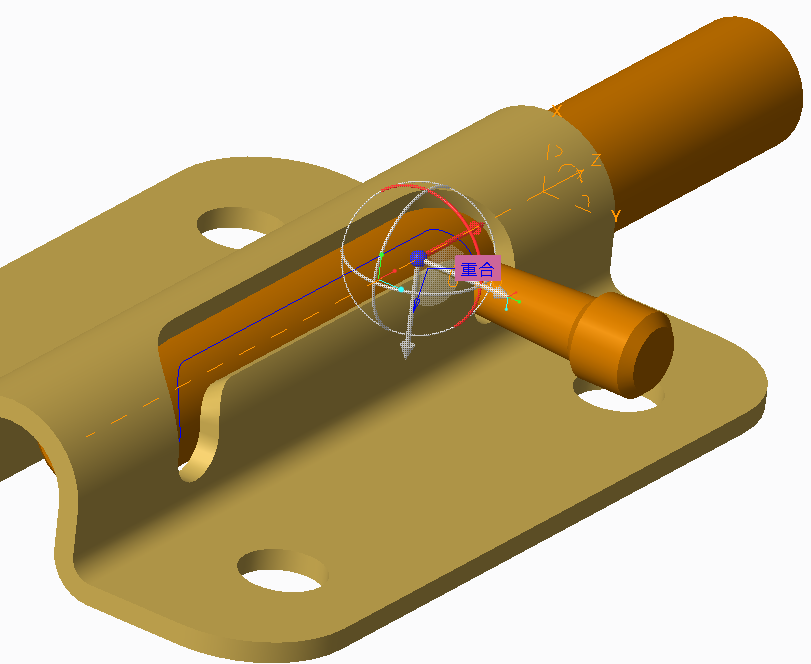
• 销钉 (Rigid) - 将元件连接至参考轴,以使元件以一个自由度沿此轴旋转或移动。选择轴、边、曲线或曲面作为轴参考。选择基准点、顶点或曲面作为平移参考。“销”(Pin) 连接集具两种约束:轴对齐和重合。
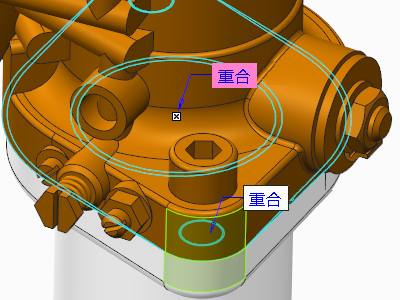
• 滑块 (Slider) - 将元件连接至参考轴,以使元件以一个自由度沿此轴移动。选择边或对齐轴作为对齐参考。选取曲面作为旋转参考。“滑块”(Slider) 连接集有两种约束:轴对齐和重合以限制沿轴旋转。
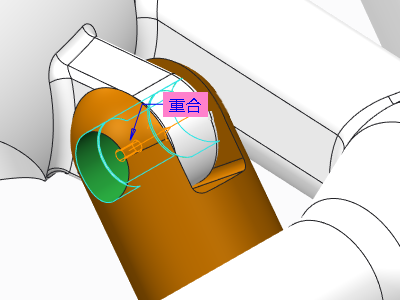
• 圆柱 (Cylinder) - 连接元件,以使其以两个自由度沿着指定轴移动并绕其旋转。选择轴、边或曲线作为轴对齐参考。“圆柱”(Cylinder) 连接集有一个约束。
• “平面”(Planar) - 连接元件,以使其在一个平面内彼此相对移动,在该平面内有两个自由度,围绕与其正交的轴有一个自由度 (下图中的箭头)。为重合约束选择曲面参考。“平面”(Planar) 连接集具有单个平面配对或对齐约束。配对或对齐约束可被反转或偏移。
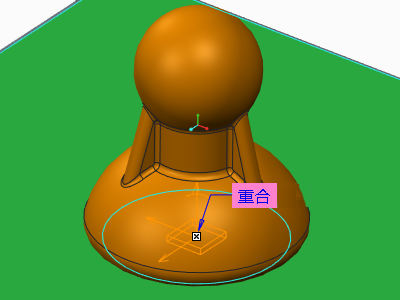
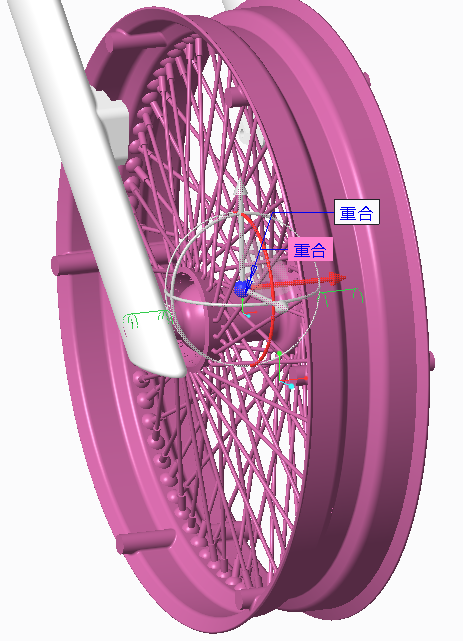
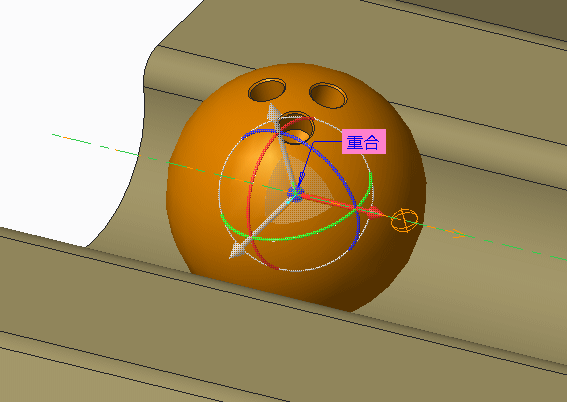
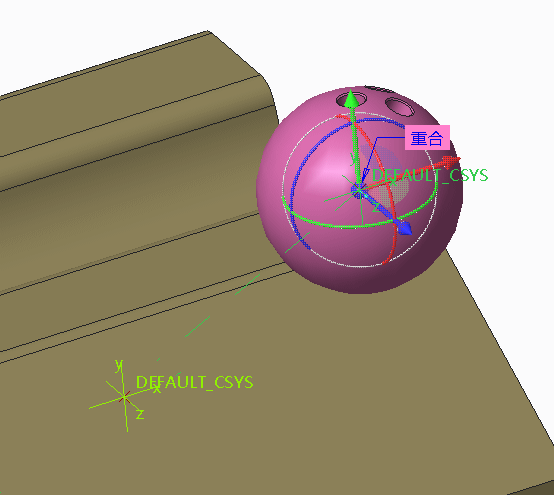
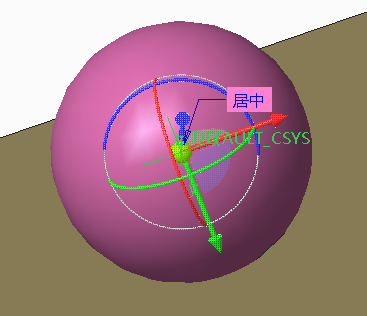
• 球 (Ball) - 连接元件,使其可以三个自由度在任意方向上旋转 (360° 旋转)。选择点、顶点或曲线端点作为对齐参考。“球”(Ball) 连接集具有一个点对点重合约束。
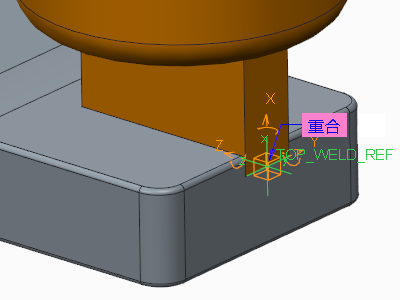
• 焊缝 (Weld) - 将一个元件连接到另一个元件,使它们无法相对移动。通过将元件的坐标系与装配中的坐标系对齐而将元件放置在装配中。可在装配中用开放的自由度调整元件。“焊缝”(Weld) 连接具有一个坐标系对齐的重合约束。
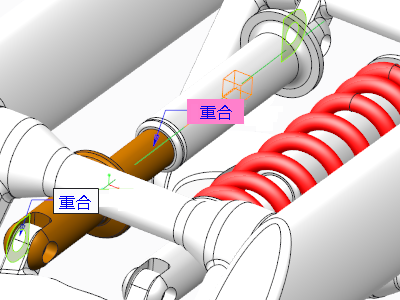
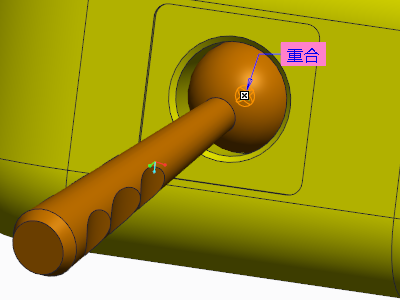
• 轴承 (Bearing) -“球”(Ball) 和“滑块”(Slider) 连接的组合,具有四个自由度。具有三个自由度 (360° 旋转) 和沿参考轴移动。对于第一个参考,在元件或装配上选取一点。对于第二个参考,在装配或元件上选取边、轴或曲线。点参考可以自由地绕边旋转并沿其长度移动。“承载”(Bearing) 连接有一个“边上的点”重合约束。
• 常规 (General) - 有一个或两个可配置约束,这些约束和用户定义集中的约束相同。相切、“曲线上的点”和“非平面曲面上的点”不能用于“常规”(General) 连接。
• 6DOF - 不影响元件与装配相关的运动,因为未应用任何约束。元件的坐标系与装配中的坐标系对齐。
X、Y 和 Z 装配轴是允许旋转和平移的运动轴。3 个平移 DOF 相互独立。仅 x 轴旋转 DOF 独立。y 轴随 x 轴旋转,要使 y 轴独立旋转,可通过伺服电动机锁定 x 轴。z 轴随 x 轴和 y 轴旋转。要使 z 轴独立旋转,必须同时锁定 x 轴和 y 轴。
• “万向节”(Gimbal) - 具有一个中心约束的枢轴接头。坐标系中心对齐,但不允许轴自由转动。
• 槽 (Slot) - 非直轨迹上的点。此连接有四个自由度,其中点在三个方向上遵循轨迹。对于第一个参考,在元件或装配上选取一点。所参考的点遵循非直参考轨迹。轨迹具有在配置连接时所设置的端点。“槽”(Slot) 连接具有单个“点与多条边或曲线对齐”约束。