継ぎ手を再定義するには
右クリックで表示されるショートカットメニューの

を使用して、継ぎ手の点を再定義して配置し、反転やねじれを適用することによって、挿入中に継ぎ手の方向を変更できます。
継ぎ手の点を再定義するには
1. モデルツリーまたはグラフィックウィンドウで継ぎ手を選択し、右クリックして
をクリックします。
「継ぎ手再定義」(REDEF FITT) メニューが表示されます。
2. 「点」(Point) をクリックします。「適合点」(FITT PNT) メニューが表示されます。
3. 「配置点」(Place Point) をクリックします。「選択」(Select) メニューが表示されます。
4. 点を選択して「実行」(Done) をクリックします。
5. 必要に応じて、「点整列」(Align Point) をクリックして整列点を変更します。
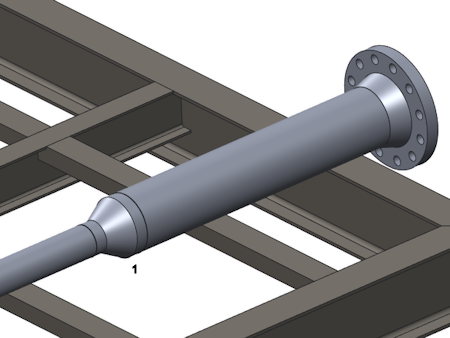
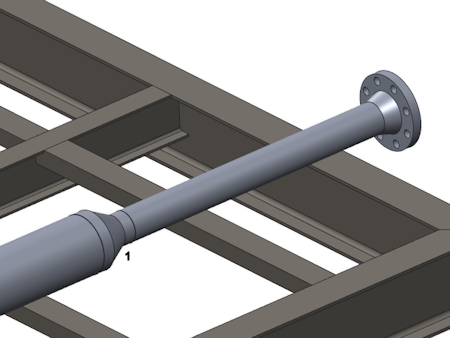
継ぎ手の方向を再定義するには
以下の図では、継ぎ手の方向が再定義されています。
1. モデルツリーまたはグラフィックウィンドウで再定義する継ぎ手を選択し、右クリックしてショートカットメニューの
をクリックします。
「継ぎ手再定義」(REDEF FITT) メニューが表示されます。
2. 「方向」(Orientation) をクリックします。「継ぎ手方向」(ORIENT FIT) メニューが表示されます。継ぎ手を反転するには、手順 4 に進みます。継ぎ手にねじれを適用するには、手順 5 に進みます。
3. 「反転」(Flip) をクリックします。入力ポートの位置が反転します。
4. 「ねじれ」(Twist) をクリックして、以下のうちの 1 つまたはすべてを必要に応じて行います。
◦ 「ゼロ参照設定」(Set Zero Ref) を使用して、ハイライトされているポートの x 軸にゼロ角度参照になるようにエッジ/軸を設定します。
内部に挿入されたコーナー継ぎ手にはねじれを適用できません。
◦ 「ゼロ参照解除」(Clear Zero Ref) を使用して、カレント位置に比例する継ぎ手ねじれを変更することによって、以前のゼロ参照設定を削除します。継ぎ手は同じ位置に残り、ねじれ寸法が消えます。
◦ 「値を入力」(Enter Value) を使用して、参照ポート z 軸からのハイライトされたポートの回転角度を指定します。ゼロ参照がない場合は、この角度はカレント位置に相対します。ゼロ参照がある場合は、角度はハイライトされた入力ポートのゼロ参照と x 軸の間になります。
◦ 「X 軸整列」(Align X) を使用して、ハイライトされた入力ポートの x 軸をジオメトリ参照に整列します。
◦ 「Y 軸整列」(Align Y) を使用して、y 軸を整列します。
寸法が更新され、継ぎ手が適切な位置に移動します。