물리
PID 컨트롤러는 측정된 프로세스 변수(PV)와 원하는 셋포인트(SP) 간의  차이를 평가하여 제어 변수
차이를 평가하여 제어 변수  에 보정을 적용합니다. 비례(P), 적분(I) 및 미분(D) 항의 조합을 PID 컨트롤러라고 합니다. 이러한 세 가지 제어 항은 정확하고 최적의 응답을 얻기 위해 응용 프로그램에 따라 함께 또는 두 개를 조합하여 변경됩니다. PID 컨트롤러의 일반적인 워크플로는 다음 그림과 같습니다.
에 보정을 적용합니다. 비례(P), 적분(I) 및 미분(D) 항의 조합을 PID 컨트롤러라고 합니다. 이러한 세 가지 제어 항은 정확하고 최적의 응답을 얻기 위해 응용 프로그램에 따라 함께 또는 두 개를 조합하여 변경됩니다. PID 컨트롤러의 일반적인 워크플로는 다음 그림과 같습니다.
차이를 평가하여 제어 변수 에 보정을 적용합니다. 비례(P), 적분(I) 및 미분(D) 항의 조합을 PID 컨트롤러라고 합니다. 이러한 세 가지 제어 항은 정확하고 최적의 응답을 얻기 위해 응용 프로그램에 따라 함께 또는 두 개를 조합하여 변경됩니다. PID 컨트롤러의 일반적인 워크플로는 다음 그림과 같습니다.PID 컨트롤러의 블록 다이어그램
출처: Wikipedia

제어 변수를 제어하는 함수에는 병렬(이상적) 및 표준 형식이 있습니다. 제어 함수의 병렬(이상적) 형식은 다음과 같습니다.

여기서 각 항목은 다음을 나타냅니다.
= 제어 변수 = 프로세스 변수(PV)와 셋포인트(SP) 간의 오류 = 비례 항에 대한 계수(비례 게인)
= 비례 항에 대한 계수(비례 게인) = 적분 항에 대한 계수(적분 게인)
= 적분 항에 대한 계수(적분 게인) = 미분 항에 대한 계수(미분 게인)
= 미분 항에 대한 계수(미분 게인)제어 함수의 표준 형식은 다음과 같습니다.

여기서 각 항목은 다음을 나타냅니다.
= 비례 항에 대한 계수(비례 게인) = 적분 시간, I-컨트롤러가 오류를 완전히 제거하려고 시도하는 시간 샘플
= 적분 시간, I-컨트롤러가 오류를 완전히 제거하려고 시도하는 시간 샘플 = 미분 시간, 미분 항이 미래 오류를 예측하려고 시도하는 시간
= 미분 시간, 미분 항이 미래 오류를 예측하려고 시도하는 시간PID의 세 가지 제어 항의 동작은 다음과 같습니다.
비례 항(P-컨트롤러)
P-컨트롤러는 현재 오류 값(SP - PV)에 비례하는 출력을 제공합니다. 셋포인트(SP)와 프로세스 변수(PV) 간의 결과 오류에 비례 상수()를 곱하여 출력을 얻습니다. 출력 응답의 속도는 비례 게인()에 따라 달라집니다. ()의 값이 높을수록 지정된 오류 값에 대한 출력이 크게 변하고 시스템이 불안정해질 수 있습니다. 반면에 ()의 값이 작을수록 지정된 오류의 변화와 시스템 변동에 대한 시스템의 응답성이 떨어집니다. P-컨트롤러는 완전히 0이 아닌 오류 값에 의해 구동되므로 항상 안정 상태 오류와 함께 작동합니다. 적용된 보정이 0에 가까워지고 오류도 0에 가까워지므로 P-컨트롤러로는 셋포인트를 도달할 수 없습니다. 일반적으로 산업 사례에 따르면 비례 항이 출력 응답의 대부분을 차지해야 합니다.
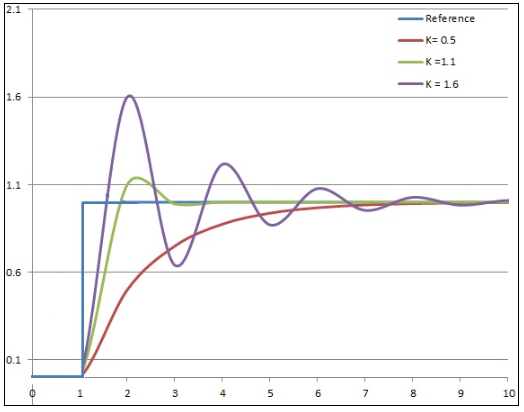
)를 곱하여 출력을 얻습니다. 출력 응답의 속도는 비례 게인()에 따라 달라집니다. ()의 값이 높을수록 지정된 오류 값에 대한 출력이 크게 변하고 시스템이 불안정해질 수 있습니다. 반면에 ()의 값이 작을수록 지정된 오류의 변화와 시스템 변동에 대한 시스템의 응답성이 떨어집니다. P-컨트롤러는 완전히 0이 아닌 오류 값에 의해 구동되므로 항상 안정 상태 오류와 함께 작동합니다. 적용된 보정이 0에 가까워지고 오류도 0에 가까워지므로 P-컨트롤러로는 셋포인트를 도달할 수 없습니다. 일반적으로 산업 사례에 따르면 비례 항이 출력 응답의 대부분을 차지해야 합니다.비례 게인()에 대한 시스템의 응답은 다음 그림과 같습니다. ()의 증가에 따라 프로세스 변수가 셋포인트를 오버슈트하고 진동을 시작하는 것을 확인할 수 있습니다.
)에 대한 시스템의 응답은 다음 그림과 같습니다. ()의 증가에 따라 프로세스 변수가 셋포인트를 오버슈트하고 진동을 시작하는 것을 확인할 수 있습니다.시간 경과에 따른 SP의 단계 변화에 대한 PV의 응답. () 및 ()은 일정하게 유지됨
) 및 ()은 일정하게 유지됨출처: Wikipedia
적분 항(I-컨트롤러)
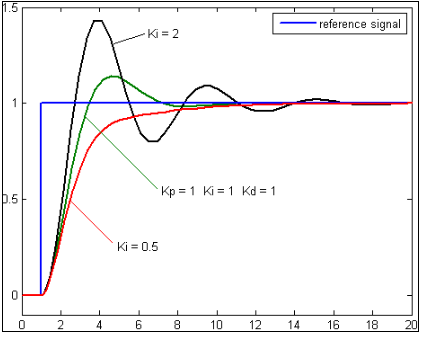
적분 항은 과거 오류 값을 고려하여 오류가 0에 도달할 때까지 일정 기간 동안 적분합니다. 셋포인트에서 얼마나 멀리 떨어져 있는지만 고려하는 P-컨트롤러와 달리 I-컨트롤러는 프로세스 변수가 셋포인트에서 얼마나 오래, 얼마나 멀리 떨어져 있는지를 고려합니다. I-컨트롤러는 누적 오류 값에 게인()을 추가하여 P-컨트롤러 적용 후 잔류 오류를 제거하려고 합니다. I-컨트롤러는 주로 시스템의 안정 상태 오류를 줄이는 데 사용됩니다. 많은 응용 프로그램에서 결합된 P-I 컨트롤러는 우수한 응답을 얻기에 충분합니다. 즉, P-컨트롤러로 셋포인트까지 가속화하고 I-컨트롤러로 안정 상태 오류를 제거합니다. 그러나 누적 오류를 0으로 만드는 프로세스에서 I-컨트롤러는 때때로 다음 메시지와 같이 출력 응답을 오버슈트할 수 있습니다.
)을 추가하여 P-컨트롤러 적용 후 잔류 오류를 제거하려고 합니다. I-컨트롤러는 주로 시스템의 안정 상태 오류를 줄이는 데 사용됩니다. 많은 응용 프로그램에서 결합된 P-I 컨트롤러는 우수한 응답을 얻기에 충분합니다. 즉, P-컨트롤러로 셋포인트까지 가속화하고 I-컨트롤러로 안정 상태 오류를 제거합니다. 그러나 누적 오류를 0으로 만드는 프로세스에서 I-컨트롤러는 때때로 다음 메시지와 같이 출력 응답을 오버슈트할 수 있습니다.시간 경과에 따른 SP의 단계 변화에 대한 PV의 응답. () 및 ()은 일정하게 유지됨
) 및 ()은 일정하게 유지됨출처: Wikipedia
미분 항(D-컨트롤러)
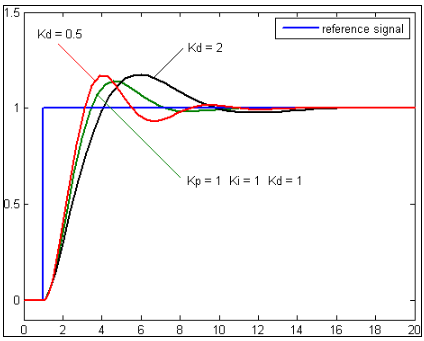
미분 항은 시간 경과에 따른 오류의 기울기를 결정하고 여기에 미분 게인()을 곱합니다. D-컨트롤러는 현재 변화율에 따라 오류의 미래 동작을 예측하고 시스템 출력 응답을 빠르게 처리합니다. 변화가 크거나 기울기가 지속적으로 변하는 경우 변화를 제어하기 위해 높은 댐핑 효과가 필요합니다. D-컨트롤러는 프로세스 변수의 급격한 변화에 대응할 수 있는 방향으로 제어 장치를 이동합니다. 순수 D-컨트롤러는 오류의 변화율만 고려하므로 오류를 0으로 만들 수 없습니다. 다음 그림과 같이 댐핑을 통해 변화율을 0에 가깝게 만들어 출력 응답의 오버슈트를 줄이려고 시도합니다.
)을 곱합니다. D-컨트롤러는 현재 변화율에 따라 오류의 미래 동작을 예측하고 시스템 출력 응답을 빠르게 처리합니다. 변화가 크거나 기울기가 지속적으로 변하는 경우 변화를 제어하기 위해 높은 댐핑 효과가 필요합니다. D-컨트롤러는 프로세스 변수의 급격한 변화에 대응할 수 있는 방향으로 제어 장치를 이동합니다. 순수 D-컨트롤러는 오류의 변화율만 고려하므로 오류를 0으로 만들 수 없습니다. 다음 그림과 같이 댐핑을 통해 변화율을 0에 가깝게 만들어 출력 응답의 오버슈트를 줄이려고 시도합니다.시간 경과에 따른 SP의 단계 변화에 대한 PV의 응답. () 및 ()은 일정하게 유지됨
) 및 ()은 일정하게 유지됨출처: Wikipedia