Fisica
Il controllo PID applica la correzione a una variabile di controllo  valutando la differenza
valutando la differenza  tra la variabile di processo misurata (PV) e il punto di regolazione desiderato (SP). Una combinazione dei termini proporzionale (P), integrale (I) e derivato (D) è chiamata controllo PID. Questi tre termini di controllo vengono variati insieme o in combinazione di due in base all'applicazione per ottenere una risposta accurata e ottimale. Il workflow tipico del controllo PID è mostrato nella figura riportata di seguito.
tra la variabile di processo misurata (PV) e il punto di regolazione desiderato (SP). Una combinazione dei termini proporzionale (P), integrale (I) e derivato (D) è chiamata controllo PID. Questi tre termini di controllo vengono variati insieme o in combinazione di due in base all'applicazione per ottenere una risposta accurata e ottimale. Il workflow tipico del controllo PID è mostrato nella figura riportata di seguito.
valutando la differenza tra la variabile di processo misurata (PV) e il punto di regolazione desiderato (SP). Una combinazione dei termini proporzionale (P), integrale (I) e derivato (D) è chiamata controllo PID. Questi tre termini di controllo vengono variati insieme o in combinazione di due in base all'applicazione per ottenere una risposta accurata e ottimale. Il workflow tipico del controllo PID è mostrato nella figura riportata di seguito.Diagramma a blocchi del controllo PID
Fonte: Wikipedia

La funzione che governa la variabile di controllo è disponibile nei moduli Parallelo (ideale) (Parallel (Ideal)) e Standard. Il modulo Parallelo (ideale) (Parallel (Ideal)) della funzione di controllo è:

dove
= Variabile di controllo = Errore tra la variabile di processo (PV) e il punto di regolazione (SP) = Coefficiente per il termine proporzionale (guadagno proporzionale)
= Coefficiente per il termine proporzionale (guadagno proporzionale) = Coefficiente per il termine integrale (guadagno integrale)
= Coefficiente per il termine integrale (guadagno integrale) = Coefficiente per il termine derivato (guadagno derivativo)
= Coefficiente per il termine derivato (guadagno derivativo)Il modulo Standard della funzione di controllo è:

dove
= Coefficiente per il termine proporzionale (guadagno proporzionale) = Tempo integrale, campione di tempo in cui il controllo I tenta di eliminare completamente l'errore
= Tempo integrale, campione di tempo in cui il controllo I tenta di eliminare completamente l'errore = Tempo derivativo, tempo in cui il termine derivato tenta di prevedere l'errore futuro
= Tempo derivativo, tempo in cui il termine derivato tenta di prevedere l'errore futuroI comportamenti dei tre termini di controllo del PID sono:
Termine proporzionale (controllo P)
Il controllo P fornisce un output proporzionale al valore corrente di errore (SP - PV). L'errore risultante tra il punto di regolazione (SP) e la variabile di processo (PV) viene moltiplicato per una costante proporzionale () per ottenere l'output. La velocità della risposta di output dipende dal guadagno proporzionale (). Un valore più elevato di () determina un cambiamento significativo nell'output per un determinato valore di errore e può rendere instabile il sistema. Al contrario, un valore più ridotto di () rende il sistema meno reattivo a una determinata modifica dell'errore e a qualsiasi fluttuazione del sistema. Il controllo P opera sempre con un errore in regime stazionario, poiché è completamente guidato da un valore di errore diverso da zero. Il punto di regolazione non può essere raggiunto con il controllo P, poiché la correzione applicata si avvicina a zero con l'errore che si avvicina a zero. In generale, le pratiche industriali suggeriscono che il termine proporzionale debba contribuire alla maggior parte della risposta dell'output.
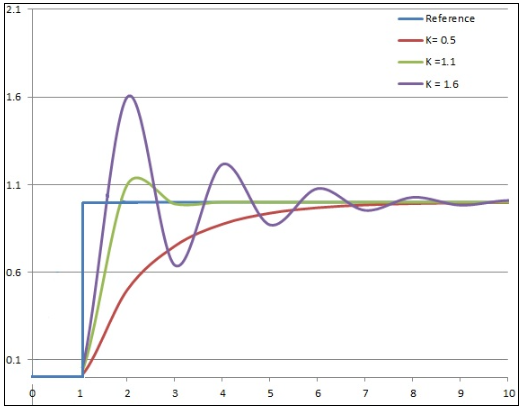
) per ottenere l'output. La velocità della risposta di output dipende dal guadagno proporzionale (). Un valore più elevato di () determina un cambiamento significativo nell'output per un determinato valore di errore e può rendere instabile il sistema. Al contrario, un valore più ridotto di () rende il sistema meno reattivo a una determinata modifica dell'errore e a qualsiasi fluttuazione del sistema. Il controllo P opera sempre con un errore in regime stazionario, poiché è completamente guidato da un valore di errore diverso da zero. Il punto di regolazione non può essere raggiunto con il controllo P, poiché la correzione applicata si avvicina a zero con l'errore che si avvicina a zero. In generale, le pratiche industriali suggeriscono che il termine proporzionale debba contribuire alla maggior parte della risposta dell'output.Nell'immagine riportata di seguito è illustrata la risposta di un sistema al guadagno proporzionale (). Si può notare che, con l'aumento di , la variabile di processo oltrepassa il punto di regolazione e inizia a oscillare.
). Si può notare che, con l'aumento di , la variabile di processo oltrepassa il punto di regolazione e inizia a oscillare.Risposta di PV al cambio di passo di SP con il tempo. () e () vengono mantenuti costanti
) e () vengono mantenuti costantiFonte: Wikipedia
Termine integrale (controllo I)
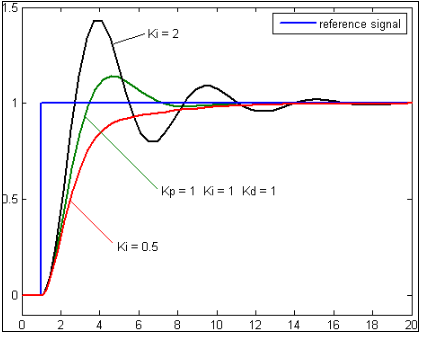
Il termine integrale tiene conto dei valori di errore passati e li integra in un periodo di tempo, fino a quando l'errore non raggiunge zero. Il controllo I considera la durata e la distanza della variabile di processo dal punto di regolazione, a differenza del controllo P che considera solo la distanza. Il controllo I cerca di eliminare l'errore residuo dopo l'applicazione del controllo P aggiungendo un guadagno () al valore cumulativo dell'errore. Il controllo I viene utilizzato principalmente per ridurre l'errore in regime stazionario nel sistema. Per molte applicazioni, i controlli P e I sono combinati e sufficienti per ottenere una risposta soddisfacente, che accelera il processo fino al punto di regolazione con il controllo P ed elimina l'errore in regime stazionario con il controllo I. Tuttavia, nel processo di azzeramento dell'errore cumulativo, il controllo I talvolta può oltrepassare la risposta dell'output, come mostrato nel messaggio indicato di seguito.
) al valore cumulativo dell'errore. Il controllo I viene utilizzato principalmente per ridurre l'errore in regime stazionario nel sistema. Per molte applicazioni, i controlli P e I sono combinati e sufficienti per ottenere una risposta soddisfacente, che accelera il processo fino al punto di regolazione con il controllo P ed elimina l'errore in regime stazionario con il controllo I. Tuttavia, nel processo di azzeramento dell'errore cumulativo, il controllo I talvolta può oltrepassare la risposta dell'output, come mostrato nel messaggio indicato di seguito.Risposta di PV al cambio di passo di SP con il tempo. () e () vengono mantenuti costanti
) e () vengono mantenuti costantiFonte: Wikipedia
Termine derivato (controllo D)
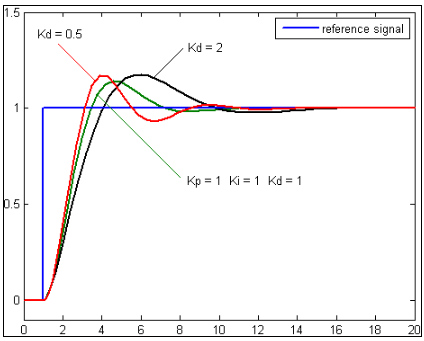
Il termine derivato determina la pendenza dell'errore nel tempo e la moltiplica per il guadagno derivato (). Il controllo D anticipa il comportamento futuro dell'errore in base alla frequenza di modifica corrente e accelera la risposta dell'output del sistema. Se il cambiamento è elevato o la pendenza varia continuamente, è necessario un elevato effetto di smorzamento per controllare la modifica. Il controllo D sposta il dispositivo di controllo in una direzione tale da contrastare la modifica improvvisa della variabile di processo. Un controllo D puro non può azzerare l'errore, in quanto considera soltanto la frequenza di modifica dell'errore. Tenta unicamente di azzerare la frequenza di modifica smorzando e riducendo in tal modo la possibilità di oltrepassare la risposta dell'output, come illustrato nella figura riportata di seguito.
). Il controllo D anticipa il comportamento futuro dell'errore in base alla frequenza di modifica corrente e accelera la risposta dell'output del sistema. Se il cambiamento è elevato o la pendenza varia continuamente, è necessario un elevato effetto di smorzamento per controllare la modifica. Il controllo D sposta il dispositivo di controllo in una direzione tale da contrastare la modifica improvvisa della variabile di processo. Un controllo D puro non può azzerare l'errore, in quanto considera soltanto la frequenza di modifica dell'errore. Tenta unicamente di azzerare la frequenza di modifica smorzando e riducendo in tal modo la possibilità di oltrepassare la risposta dell'output, come illustrato nella figura riportata di seguito.Risposta di PV al cambio di passo di SP con il tempo. () e () vengono mantenuti costanti
) e () vengono mantenuti costantiFonte: Wikipedia