Contact entre les corps
Utilisez la fonction de contact pour relier des corps dans un modèle. Définissez un contact entre un corps non désigné et la géométrie de départ ou entre deux corps non désignés. Les corps sont reliés à l'aide de l'interface liée et restent toujours adjacents pendant l'analyse. Les charges et les restrictions appliquées sont transférées entre les corps reliés. Tous les contacts définis dans une étude sont pris en compte lors de la génération de la conception finale.
Lorsque vous travaillez dans le contexte d'un assemblage, vous pouvez définir des contacts entre les corps de différentes pièces de l'assemblage.
Lorsque vous créez des contacts liés, vous pouvez sélectionner les surfaces sur lesquelles vous souhaitez que la géométrie de départ soit reliée au corps non désigné. Cette zone est appelée la région d'interaction. Un décalage est créé uniquement autour de la région d'interaction. Pour plus d'informations, consultez la rubrique Exemple : création d'un contact avec une zone d'interaction.
Pour créer un contact
1. Cliquez sur  Contact (Contact). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre.
Contact (Contact). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre.
Contact (Contact). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre.2. [Facultatif] Spécifiez un nom pour le contact dans la zone Nom (Name).
3. Sélectionnez le premier corps dans l'arbre du modèle ou dans la fenêtre graphique. Le corps apparaît dans le collecteur Corps (Body) de la boîte de dialogue.
4. Répétez l'étape 3 pour sélectionner le deuxième corps.
5. Si vous le souhaitez, indiquez une valeur de décalage positive supérieure à trois fois la taille de l'élément.
Vous ne pouvez spécifier le décalage que lorsque la géométrie de départ est sélectionnée comme référence. Cette opération n'est pas possible lorsqu'une forme de départ est sélectionnée comme référence. La spécification d'un décalage crée une géométrie préservée autour du corps non désigné, à l'intérieur de la géométrie de départ. |
6. Si vous le souhaitez, sélectionnez les surfaces sur lesquelles vous souhaitez que la géométrie de départ soit reliée au corps non désigné en tant que région d'interaction.
7. Cliquez sur OK (OK). Un décalage de sphère bitangente est créé autour du corps non désigné ou de la région d'interaction, à l'intérieur de la géométrie de départ.
Les corps sélectionnés sont reliés l'aide d'une interface liée et un noeud de Contacts (Contacts) est créé dans l'arbre génératif. Développez le noeud > pour afficher toutes les interfaces définies pour le modèle.
Un noeud  Géométrie liée (Connected Geometry) est également créé dans l'arbre génératif et les corps sélectionnés sont ajoutés sous celui-ci en tant que corps déformables.
Géométrie liée (Connected Geometry) est également créé dans l'arbre génératif et les corps sélectionnés sont ajoutés sous celui-ci en tant que corps déformables.
Géométrie liée (Connected Geometry) est également créé dans l'arbre génératif et les corps sélectionnés sont ajoutés sous celui-ci en tant que corps déformables.Corps déformables
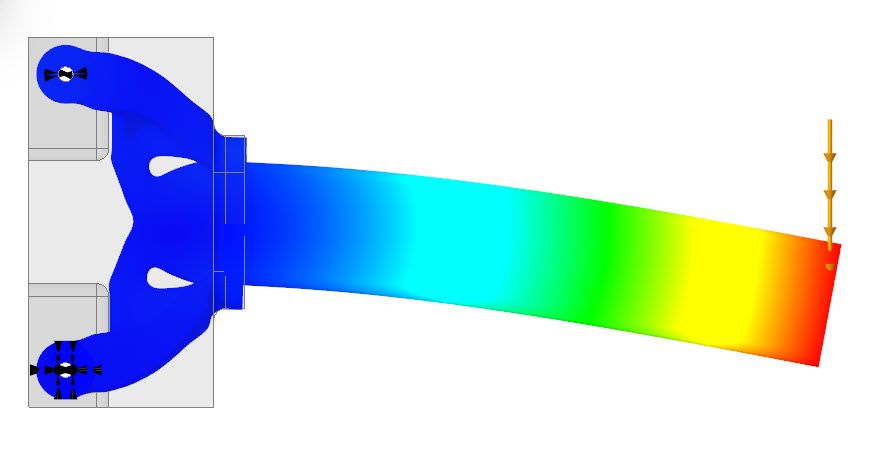
Les corps déformables  subissent une déformation durant l'optimisation en fonction des charges appliquées.
subissent une déformation durant l'optimisation en fonction des charges appliquées.
subissent une déformation durant l'optimisation en fonction des charges appliquées.La figure suivante illustre le déplacement d'un corps déformable :
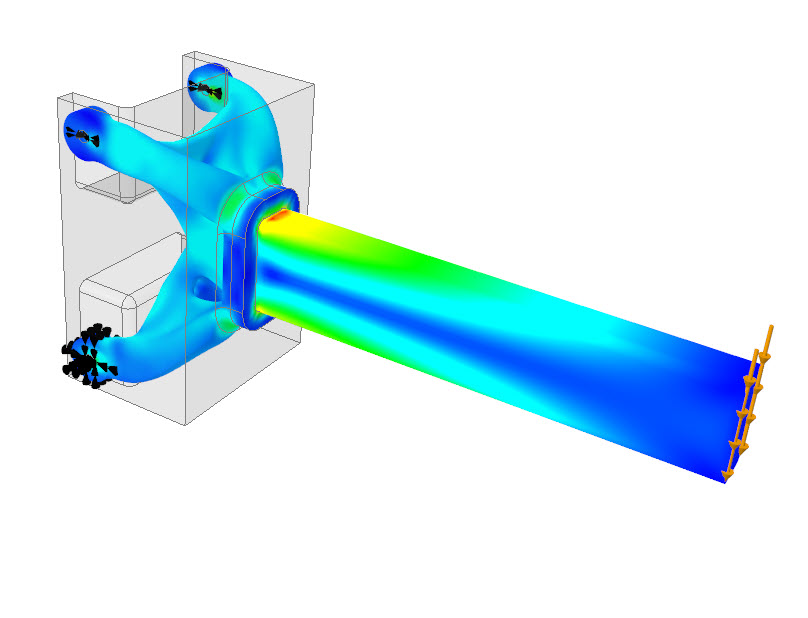
La figure suivante illustre la distribution de la contrainte dans un corps déformable :
Corps rigides
Les corps rigides  sont raides et ne subissent aucune déformation au cours de l'optimisation.
sont raides et ne subissent aucune déformation au cours de l'optimisation.
sont raides et ne subissent aucune déformation au cours de l'optimisation.La matière du corps rigide doit présenter une symétrie isotrope et sa densité doit être définie. Vous pouvez également sélectionner une matière isotrope dans la bibliothèque de matières. Lors de l'optimisation, seule la densité est prise en compte. Les charges et masses distantes avec comportement déformable ne sont pas prises en charge sur les corps rigides. Les corps ne peuvent pas être marqués comme rigides dans une étude thermique. |
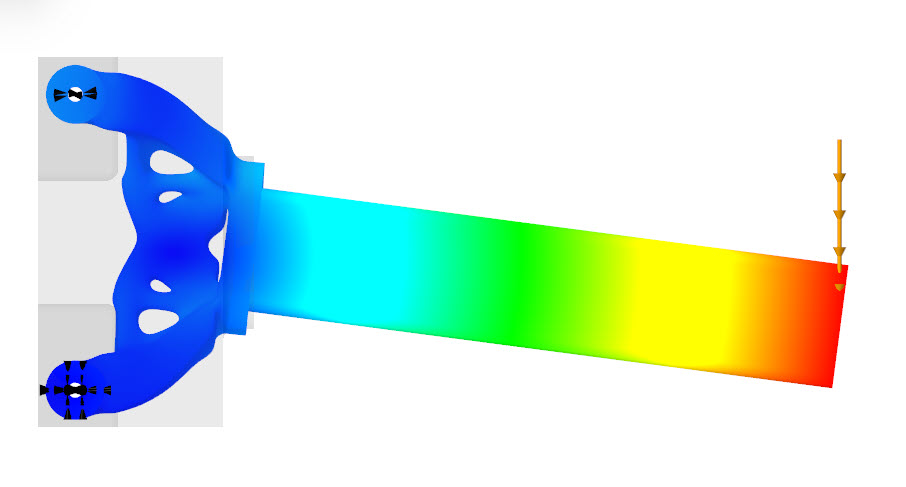
La figure suivante illustre le déplacement d'un corps rigide :
La figure suivante illustre la distribution de la contrainte dans un corps rigide :
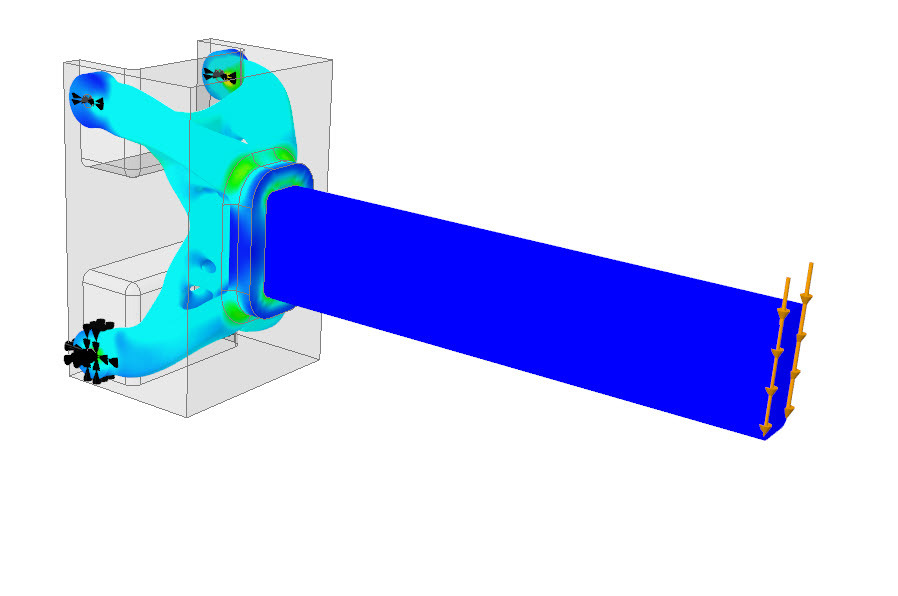
La valeur de contrainte est 0 MPa pour un corps rigide. |
Pour convertir un corps en corps rigide
1. Dans l'arbre génératif, développez le noeud Géométrie liée (Connected Geometry).
2. Sélectionnez le corps déformable, cliquez avec le bouton droit de la souris, puis cliquez sur Convertir en rigide (Convert to Rigid). Le corps sélectionné devient un corps rigide.
Pour convertir un corps en corps déformable
1. Dans l'arbre génératif, développez le noeud Géométrie liée (Connected Geometry).
2. Sélectionnez le corps rigide, cliquez avec le bouton droit de la souris, puis cliquez sur Convertir en déformable (Convert to Deformable). Le corps sélectionné devient un corps déformable.
Pour modifier un contact
Dans l'arbre génératif, sélectionnez le contact que vous souhaitez modifier, puis, dans la mini barre d'outils, cliquez sur  Modifier la définition (Edit Definition). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre. Vous pouvez modifier les corps reliés.
Modifier la définition (Edit Definition). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre. Vous pouvez modifier les corps reliés.
Modifier la définition (Edit Definition). La boîte de dialogue Définition de contact (Contact Definition) s'ouvre. Vous pouvez modifier les corps reliés.Pour supprimer un contact
Cliquez avec le bouton droit sur un contact dans l'arbre génératif, puis cliquez sur  Supprimer (Delete).
Supprimer (Delete).
Supprimer (Delete).Pour renommer un contact
Cliquez avec le bouton droit sur un contact dans l'arbre génératif, puis cliquez sur Renommer (Rename).