物理
PID 控制器通过评估测量的进程变量 (PV) 和所需设置点 (SP) 之间的差异  来对控制变量
来对控制变量  进行修正。比例 (P)、积分 (I) 和导数 (D) 的组合称为 PID 控制器。要获得准确响应和最佳响应,可根据用途使这三个控制项一起变化或组合使用其中的两个项。PID 控制器的典型工作流如下图所示。
进行修正。比例 (P)、积分 (I) 和导数 (D) 的组合称为 PID 控制器。要获得准确响应和最佳响应,可根据用途使这三个控制项一起变化或组合使用其中的两个项。PID 控制器的典型工作流如下图所示。
来对控制变量 进行修正。比例 (P)、积分 (I) 和导数 (D) 的组合称为 PID 控制器。要获得准确响应和最佳响应,可根据用途使这三个控制项一起变化或组合使用其中的两个项。PID 控制器的典型工作流如下图所示。PID 控制器框图
资料来源:维基百科

用于控制控制变量的函数以“平行”(理想) 和“标准”形式存在。控制函数的“平行”(理想) 形式为

其中,
= 控制变量 = 进程变量 (PV) 与设置点 (SP) 之间的误差 = 比例项的系数 (比例增益)
= 比例项的系数 (比例增益) = 积分项的系数 (积分增益)
= 积分项的系数 (积分增益) = 导数项的系数 (导数增益)
= 导数项的系数 (导数增益)控制函数的标准形式是

其中,
= 比例项的系数 (比例增益) = 积分时间,I 控制器尝试完全消除误差的时间示例
= 积分时间,I 控制器尝试完全消除误差的时间示例 = 导数时间,即导数项尝试预测未来误差的时间
= 导数时间,即导数项尝试预测未来误差的时间PID 的三个控制项的行为如下:
比例项 (P - 控制器)
P 控制器提供与当前误差值 (SP - PV) 成比例的输出。将设置点 (SP) 和进程变量 (PV) 之间产生的误差与比例常量 () 相乘即可得到输出。输出响应的速度取决于比例增益 ()。() 值越大会导致给定误差值输出发生的变化越大,且可能使系统变得不稳定。相反,() 值越小会使系统对误差的给定变化以及系统中任何波动的响应能力越低。P 控制器始终以稳态误差运行,因为它完全由非零误差值驱动。使用 P 控制器无法达到设置点,因为应用的修正接近零,从而误差接近零。一般而言,工业实践表明,比例项必须贡献大部分输出响应。
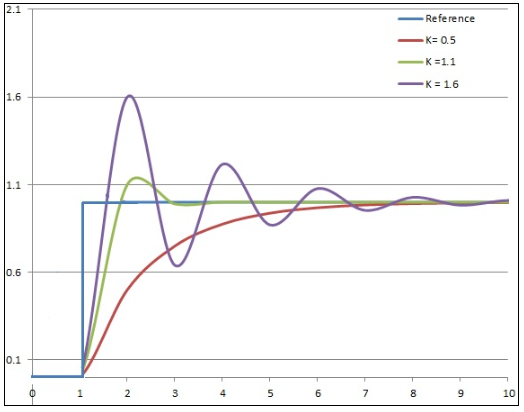
) 相乘即可得到输出。输出响应的速度取决于比例增益 ()。() 值越大会导致给定误差值输出发生的变化越大,且可能使系统变得不稳定。相反,() 值越小会使系统对误差的给定变化以及系统中任何波动的响应能力越低。P 控制器始终以稳态误差运行,因为它完全由非零误差值驱动。使用 P 控制器无法达到设置点,因为应用的修正接近零,从而误差接近零。一般而言,工业实践表明,比例项必须贡献大部分输出响应。系统对比例增益 () 的响应如下图所示。可以看出,随着 () 的增加,进程变量将超过设置点并开始振荡。
) 的响应如下图所示。可以看出,随着 () 的增加,进程变量将超过设置点并开始振荡。PV 对 SP 随时间步长变化的响应。() 和 () 保持恒定
) 和 () 保持恒定资料来源:维基百科
积分项 (I - 控制器)
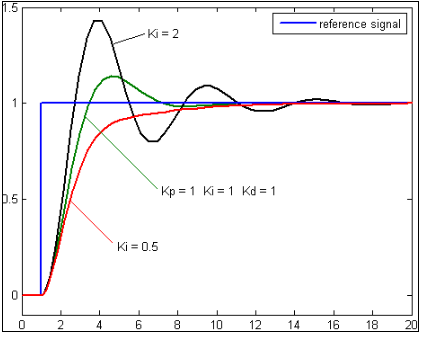
积分项考虑过去的误差值,并在一段时间内对误差值进行积分,直到误差为零。I 控制器考虑进程变量与设置点之间的距离,这与 P 控制器有所不同,后者仅考虑与设置点之间的距离。I 控制器试图通过将累积误差值加上增益 () 来消除应用 P 控制器后的残差。I 控制器主要用于减小系统中的稳态误差。许多应用中会将 P-I 控制器进行组合以获得良好响应,通过 P 控制器加快达到设置点的速度,通过 I 控制器消除稳态误差。但是,在将累积误差迭代为零的过程中,I 控制器有时会使输出响应过冲,如下面的消息所示。
) 来消除应用 P 控制器后的残差。I 控制器主要用于减小系统中的稳态误差。许多应用中会将 P-I 控制器进行组合以获得良好响应,通过 P 控制器加快达到设置点的速度,通过 I 控制器消除稳态误差。但是,在将累积误差迭代为零的过程中,I 控制器有时会使输出响应过冲,如下面的消息所示。PV 对 SP 随时间步长变化的响应。() 和 () 保持恒定
) 和 () 保持恒定资料来源:维基百科
导数项 (D - 控制器)
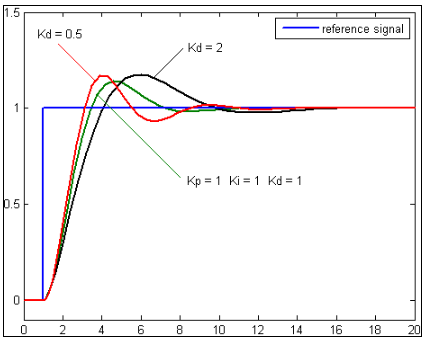
导数项用于确定误差随时间变化的斜率,并将其乘以导数增益 ()。D 控制器根据当前变化率预测误差的未来行为,并加快系统输出响应。如果变化较大或斜率连续变化,则需要较高的阻尼效果来控制变化。D 控制器向一个方向移动控制设备,以抵消进程变量的突然变化。一个纯 D 控制器不能使误差降为零,因为它只考虑误差的变化率。它仅尝试通过阻尼 (由此减小输出响应的过冲) 将变化率降为零,如下图所示。
)。D 控制器根据当前变化率预测误差的未来行为,并加快系统输出响应。如果变化较大或斜率连续变化,则需要较高的阻尼效果来控制变化。D 控制器向一个方向移动控制设备,以抵消进程变量的突然变化。一个纯 D 控制器不能使误差降为零,因为它只考虑误差的变化率。它仅尝试通过阻尼 (由此减小输出响应的过冲) 将变化率降为零,如下图所示。PV 对 SP 随时间步长变化的响应。() 和 () 保持恒定
) 和 () 保持恒定资料来源:维基百科