동적 기어 쌍의 유형
아래 테이블에 표시된 대로 각 기어 쌍 유형은 해당 동작 축에 따라 정의됩니다.
각 기어 쌍 유형은 해당 동작 축으로 정의됩니다.
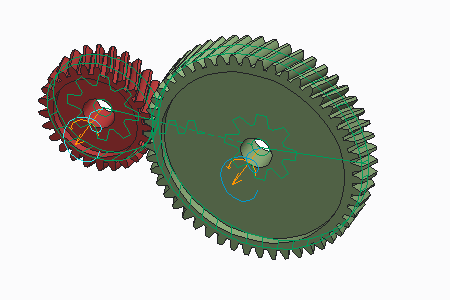
• 스퍼(Spur) - 피치 원 지름이 만나는 위치에서 서로 구르는 두 개의 원통. 기어 간의 반작용력은 전송된 토크, 기어 지름 및 제조 각도를 기준으로 계산됩니다. 스퍼 기어에는 헬리컬 각도를 사용할 수 있으며 이를 헬리컬 스퍼 기어라고도 합니다.
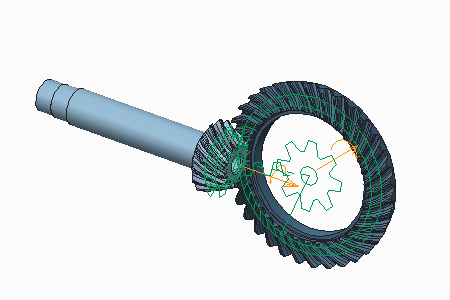
• 베벨(Bevel) - 피치 원 지름이 만나는 위치에서 서로 구르는 두 개의 원추. 기어 간의 반작용력은 전송된 토크, 기어 지름 및 제조 각도를 기준으로 계산됩니다. 베벨 기어에는 헬리컬 각도를 사용할 수 있으며 이를 스파이럴 베벨 기어라고도 합니다. 축이 평행이면 베벨 기어가 스퍼 기어 역할을 합니다.
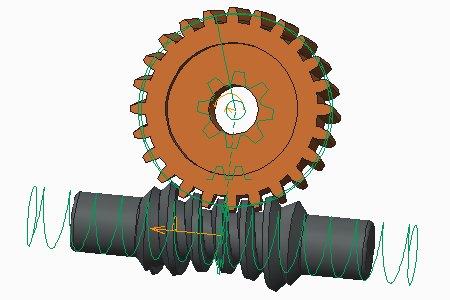
• 웜(Worm) - 웜 바디가 휠 바디보다 작고 축이 긴 크기가 다른 두 개의 기어. 웜 기어는 피치 원 지름이 만나는 위치에서 서로 스치는 원통으로 정의됩니다. 감소 비율이 커야 하는 곳에 사용합니다.
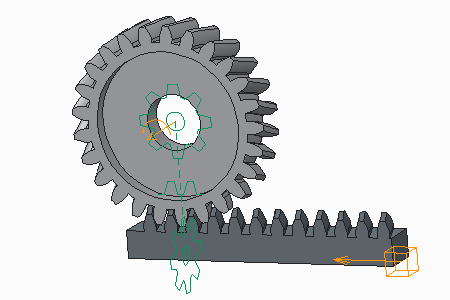
• 래크 및 피니언(Rack and Pinion) - 회전 동작을 변환 동작으로 또는 변환 동작을 회전 동작으로 변환합니다. 래크 및 피니언 기어 쌍은 래크의 피치 서피스에서 구르는 원통으로 정의됩니다. 기어 간의 반작용력은 전송된 토크, 기어의 분리 및 제조 각도를 기준으로 계산됩니다.