Dynamische Getriebepaartypen
Jeder Getriebepaartyp wird durch seine Bewegungsachsen definiert, wie in der Tabelle unten dargestellt.
Jeder Getriebepaartyp wird durch seine Bewegungsachsen definiert.
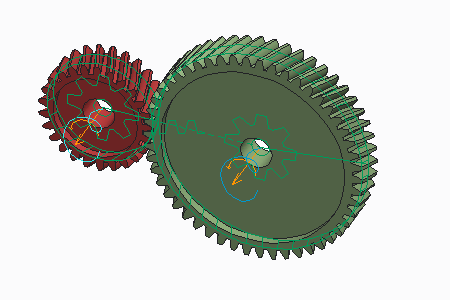
• Stirn (gerade) (Spur): Zwei Zylinder, die gegeneinander rollen, wobei sich die Wälzkreisdurchmesser berühren. Die Reaktionskräfte zwischen den Getrieben werden auf der Basis des übersetzten Drehmoments, der Getriebedurchmesser und der Fertigungswinkel berechnet. Stirnradgetriebe können einen Spiralwinkel aufweisen und werden auch als spiralförmige Stirnradgetriebe bezeichnet.
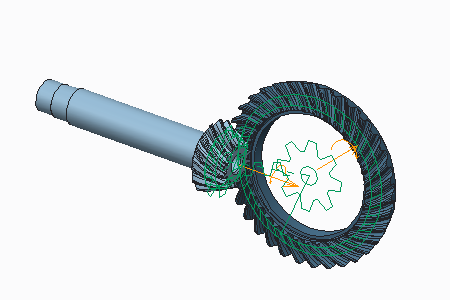
• Kegelrad (Bevel): Zwei Kegel, die gegeneinander rollen, wobei sich die Wälzkreisdurchmesser berühren. Die Reaktionskräfte zwischen den Getrieben werden auf der Basis des übersetzten Drehmoments, der Getriebedurchmesser und der Fertigungswinkel berechnet. Kegelradgetriebe können einen Spiralwinkel aufweisen und werden auch als spiralförmige Kegelradgetriebe bezeichnet. Verlaufen die Achsen parallel, fungiert ein Kegelradgetriebe als Stirnradgetriebe.
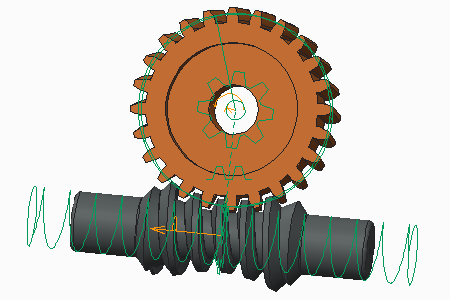
• Schneckengetriebe (Worm): Zwei Getriebe unterschiedlicher Größe, wobei der Schneckenkörper kleiner ist und eine längere Achse besitzt als der Radkörper. Schneckengetriebe werden als Getriebe definiert, die gegeneinander verschoben werden, wobei sich die Wälzkreisdurchmesser berühren. Sie werden eingesetzt, wenn ein großes Untersetzungsverhältnis erforderlich ist.
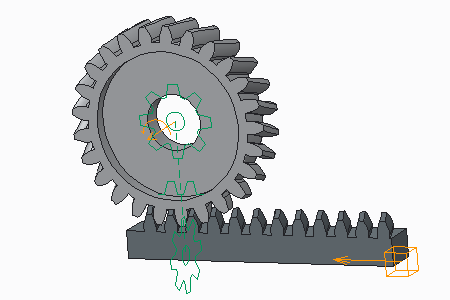
• Zahnstange und Ritzel (Rack and Pinion): Rotatorische Bewegung wird in translatorische Bewegung umgewandelt und umgekehrt. Ein Getriebepaar bestehend aus Zahnstange und Ritzel wird als Zylinder definiert, der auf der Wälzfläche der Zahnstange rollt. Die Reaktionskräfte zwischen den Getrieben werden auf der Basis des übersetzten Drehmoments, der Getriebedurchmesser und der Fertigungswinkel berechnet.